新規記事の投稿を行うことで、非表示にすることが可能です。
2018年07月07日
No.19 ヘッダー画像の作成と記事内フォントの変更【備忘録】
こんにちわ。
最終的に、研究・開発費をブログで賄っていきたい。という大きな野望のために、ブログを始めました。
と言ってますが、実際のところは自分の技術をストックしていきたい、後から見直して妥当性を検証できるようにしたい。
という、もはや何かを伝えるためではなく、ノートを書いている感覚でこのブログは運営されているわけですが、やはり外観って大切ですよね。
外向きな理由だったら、やっぱりSEO対策は必要ですし、本当の理由としては、やはり見た目が良くないと、あまり見直さないんですよね。
SEO対策としてなら、スパム認定されてるドメインなので、ゆくゆくは独り立ちしなければならないのですが、100記事くらいがストックされるまではゆっくり進んでいきましょう。
手始めに記事内のフォントと、ヘッダー作りました。
ヘッダー画像が今まで、結構気になってたんですよ。
A8.netでは、スタイルっていうのが用意されていて、デザインを選んだら、着せ替え人形のようにポンッとサイトの構成が変わるので、便利です。
便利は便利なんですけどね…テクノロジーっていうスタイルを使って来たのですが、サイバー感のあるヘッダー画像を泥臭い電気や、泥臭い機械をやっている当ブログで使用するのはなんとなく、詐欺っぽいというか…。
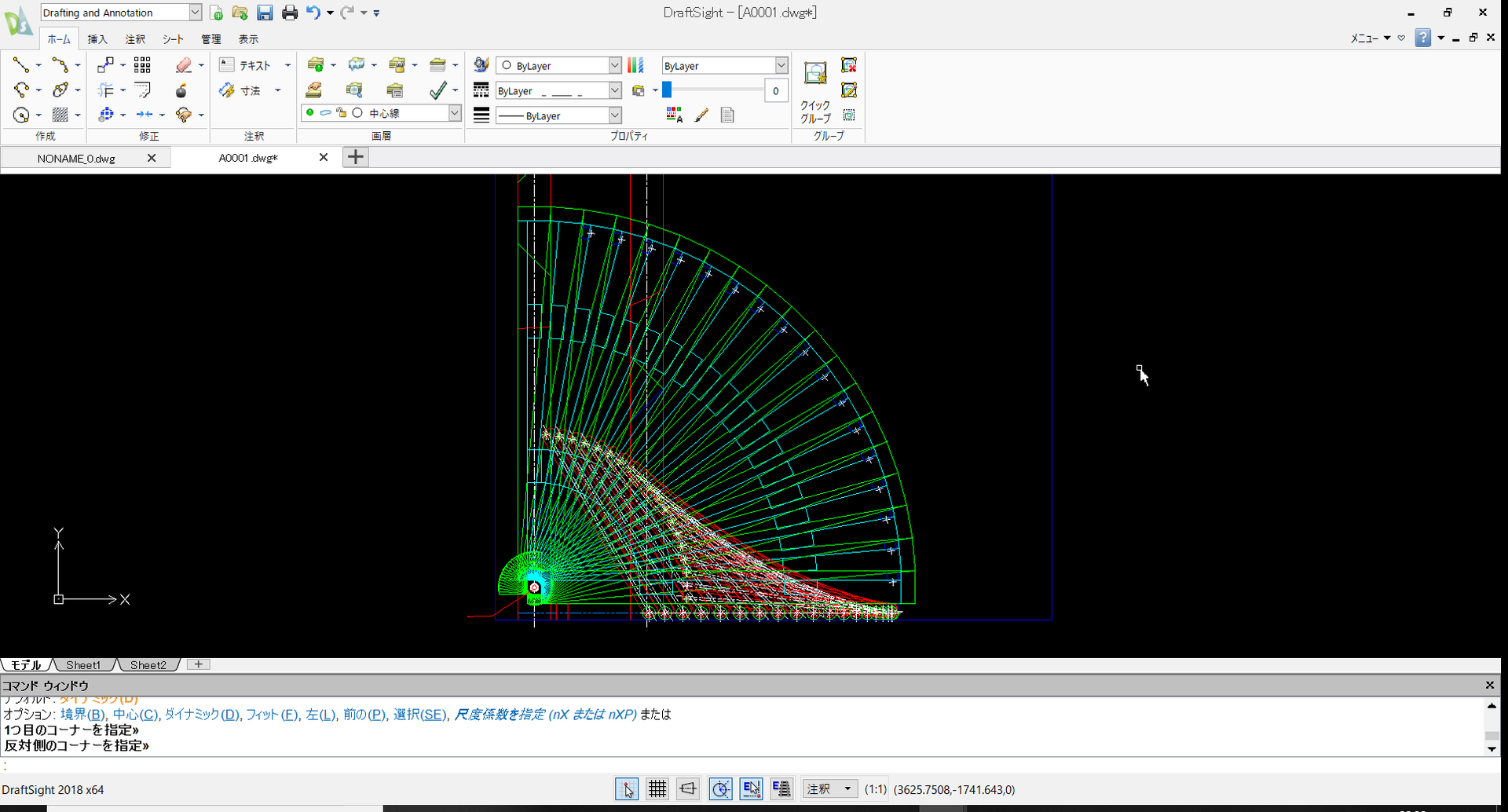
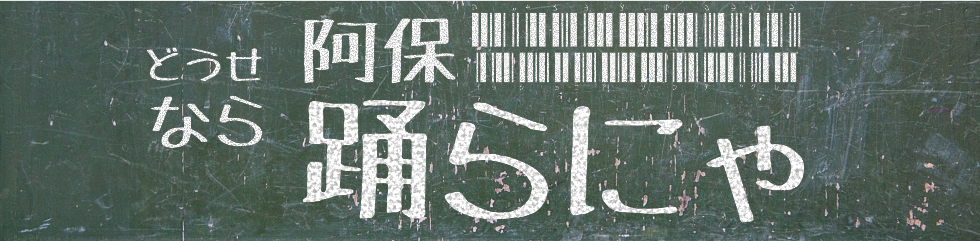
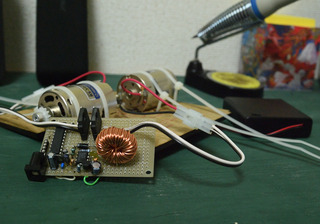
なので、薄汚れた教室、馴染みの研究室のようなイメージでヘッダー画像を作ってみました。
人から見れば散乱してる机も、使っている本人からすれば、手の届く範囲に工具等がある計算された荷物の配置。みたいな、そんな雰囲気を目指します。
使ったソフトはInkscapeです。PhotoShopなどの高級品とは縁のない当方は、ぽちぽち楽しんでます。
作ってて思ったのは、彩度が高いと難易度がどんどん高くなります。
目が引っ張られるからですかね。作り始めて、世にあふれるロゴの完成度の高さを理解しました。
今まで文句ばかり言ってすいませんという、気持ちでいっぱいです。
背景画像は、GRAPHIC BURGERさんから落としてきました。
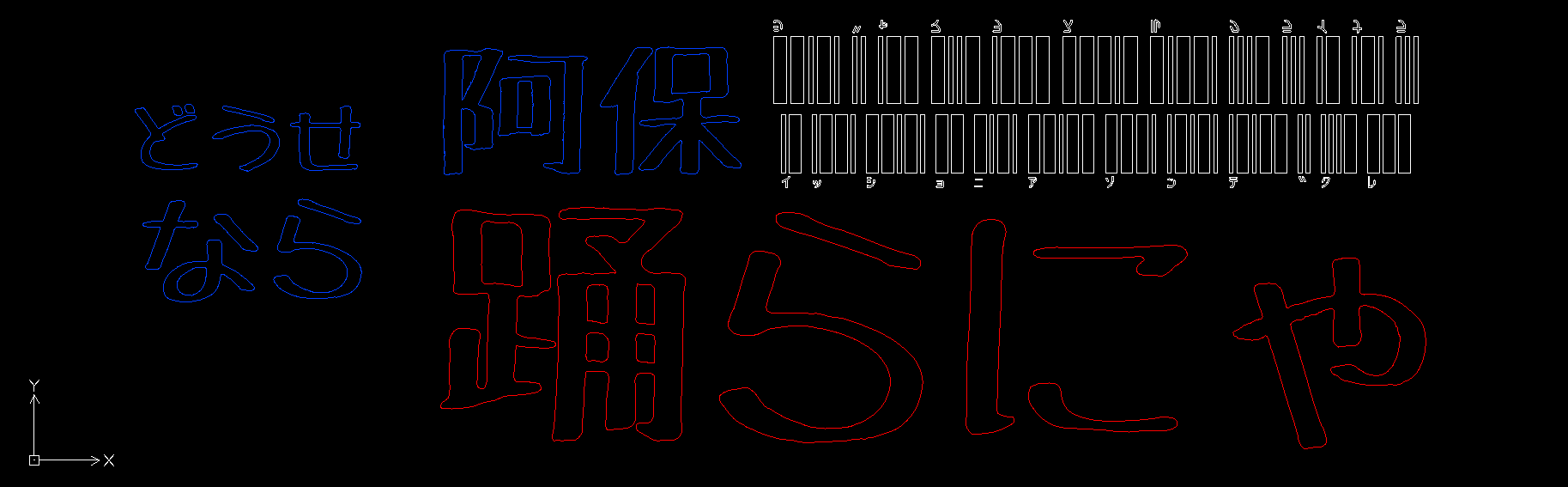
フォントは、たぬき油性マジックです。作られているのはたぬき侍さんです。これめっちゃ好きです。汎用性がめちゃくちゃ高いです。
結構いろいろフリーフォント試してみたんですけど、これが一番好きでした。
あと、右上にあるのが、モールス信号です。kakato(鎮座dopness)さんのリズムっていう曲の中にある、「邪魔をするくらいなら一緒に遊んでくれ」ってのです。そういう風に生きられるようになりたいと思ってます。思ってますが…。
ちなみに、フォントは、ぱんかれさんのGD-MorseBarcodeJAというフォントです。モールス信号のフォントって、発想が面白い!ワクワクがとまりません。
あと、ブログの記事のフォントは、なごみ極細ゴシックフォントで、数式については、MathJaxです。これはjavascriptを使うのですが、最近CDNサーバーが閉鎖されたようなので、注意が必要です。
以前までのCDNサーバーを指定していても使えることは使えるのですが、Warningはでるので、SEO的には不利になるはずです。
Kotetさんの以下の記事が参考になりました。
#jekyll MathJaxのCDNが警告を発しつつも使えてしまっていた
ということで、ヘッダー画像とフォントを変えた話でした。
ブログ「どうせ阿保なら踊らにゃ」をよろしくお願いします!
これから、きちんとヘッダーを作りこむのと、スマホのデザインはシンプル&手抜き感満載なので、サイトの改良もゆっくり進めていこうと思います。
よろしかったら、ブログランキングの向上にご協力おねがいします。

手作り・DIYランキング
最終的に、研究・開発費をブログで賄っていきたい。という大きな野望のために、ブログを始めました。
と言ってますが、実際のところは自分の技術をストックしていきたい、後から見直して妥当性を検証できるようにしたい。
という、もはや何かを伝えるためではなく、ノートを書いている感覚でこのブログは運営されているわけですが、やはり外観って大切ですよね。
外向きな理由だったら、やっぱりSEO対策は必要ですし、本当の理由としては、やはり見た目が良くないと、あまり見直さないんですよね。
SEO対策としてなら、スパム認定されてるドメインなので、ゆくゆくは独り立ちしなければならないのですが、100記事くらいがストックされるまではゆっくり進んでいきましょう。
手始めに記事内のフォントと、ヘッダー作りました。
ヘッダー画像が今まで、結構気になってたんですよ。
A8.netでは、スタイルっていうのが用意されていて、デザインを選んだら、着せ替え人形のようにポンッとサイトの構成が変わるので、便利です。
便利は便利なんですけどね…テクノロジーっていうスタイルを使って来たのですが、サイバー感のあるヘッダー画像を泥臭い電気や、泥臭い機械をやっている当ブログで使用するのはなんとなく、詐欺っぽいというか…。
なので、薄汚れた教室、馴染みの研究室のようなイメージでヘッダー画像を作ってみました。
人から見れば散乱してる机も、使っている本人からすれば、手の届く範囲に工具等がある計算された荷物の配置。みたいな、そんな雰囲気を目指します。
使ったソフトはInkscapeです。PhotoShopなどの高級品とは縁のない当方は、ぽちぽち楽しんでます。
作ってて思ったのは、彩度が高いと難易度がどんどん高くなります。
目が引っ張られるからですかね。作り始めて、世にあふれるロゴの完成度の高さを理解しました。
今まで文句ばかり言ってすいませんという、気持ちでいっぱいです。
背景画像は、GRAPHIC BURGERさんから落としてきました。
フォントは、たぬき油性マジックです。作られているのはたぬき侍さんです。これめっちゃ好きです。汎用性がめちゃくちゃ高いです。
結構いろいろフリーフォント試してみたんですけど、これが一番好きでした。
あと、右上にあるのが、モールス信号です。kakato(鎮座dopness)さんのリズムっていう曲の中にある、「邪魔をするくらいなら一緒に遊んでくれ」ってのです。そういう風に生きられるようになりたいと思ってます。思ってますが…。
ちなみに、フォントは、ぱんかれさんのGD-MorseBarcodeJAというフォントです。モールス信号のフォントって、発想が面白い!ワクワクがとまりません。
あと、ブログの記事のフォントは、なごみ極細ゴシックフォントで、数式については、MathJaxです。これはjavascriptを使うのですが、最近CDNサーバーが閉鎖されたようなので、注意が必要です。
以前までのCDNサーバーを指定していても使えることは使えるのですが、Warningはでるので、SEO的には不利になるはずです。
Kotetさんの以下の記事が参考になりました。
#jekyll MathJaxのCDNが警告を発しつつも使えてしまっていた
ということで、ヘッダー画像とフォントを変えた話でした。
ブログ「どうせ阿保なら踊らにゃ」をよろしくお願いします!
これから、きちんとヘッダーを作りこむのと、スマホのデザインはシンプル&手抜き感満載なので、サイトの改良もゆっくり進めていこうと思います。
よろしかったら、ブログランキングの向上にご協力おねがいします。
手作り・DIYランキング
【このカテゴリーの最新記事】
-
no image
-
no image
-
no image
-
no image
-
no image
2018年06月29日
No.18 放射線物質トリチウムの除去【備忘録】
こんにちわ。
恐竜博物館に行って、壊変現象について知りました。
陽子と中性子の組み合わせで原子は定まる。
時間が経つにつれて放射線を発しながら、組み合わせが変わるので、地層に含まれる放射性元素の比率と、その初期値から年代を推定することが可能である。
ただし、初期値を推定することは難しいので、精度はそれほど高くない。
*参考文献 1,2
まとめてしまうと以上になりますね。
初めて知ることだらけでなかなか時間がかかりましたが、だいぶ楽しく学べました。
参考文献1がなかなか楽しくて、ひとまず一読はしたのですが、今日スマホをいじっている間に、「水からトリチウムを分離できる吸収剤の開発に成功」という記事を見てちょっと感動したので、もう一つ深くまとめてみます。
参考文献1内の6章、身を守るための方法を考えようという記事で、除染方法等について書いてあります。
その中で、『トリチウムは水素の同位体ですから、水分子として存在した場合(H2OのHの片方がT、つまりHTOのような形)、ふつうの水と化学的には同じですので、イオン交換樹脂では取り除けないのです。福島第一原子力発電所でも除染できずにタンクに溜めているのは、トリチウムを含む水です。結局、トリチウムだけは、基準値以下に希釈して排水する以外に方法がありません(10)。』とあります。
ちなみに、記事内では、注釈10として、膨大なお金をかければトリチウムを分離できる旨が書かれています。
今回感動したのは、参考文献3です。
良くまとまっていて、なかなかエレガントな論文だと思いましたが、無謀にもまとめてみようと思います。
要素技術としては、酸化マンガン($H Mn_2 O_4$)を、水素イオンを含有する性質の強い、スピネル型構造でナノオーダーの粒子として結晶化した後、酸化水溶液と接触させて、水素イオン($H^+$)を吸収させる。
これを、人工汚染水に入れてトリチウム($T$)の濃度を時間経過とともに計測する。
結果として、人工汚染水のトリチウム濃度が、20分経過時に5500[kBq/L]から4000[kBq/L]まで減少した。
新規性としては、$T$が酸化マンガン容易に離れる性質を利用することで、吸収剤の再利用することで、吸収剤自体の体積が処理場で必要ないという点かなと思います。
以上!
ミクロの世界も、面白い!
<参考文献>
1. 放射線について考えてみよう
2. 年代測定法
3. Hideki Koyanaka and Hideo Miyatake
"Extracting Tritium from Water Using a Protonic Manganese Oxide Spinel"
Separation Science and Technology, Accepted author version posted online: 23 Apr 2015
恐竜博物館に行って、壊変現象について知りました。
陽子と中性子の組み合わせで原子は定まる。
時間が経つにつれて放射線を発しながら、組み合わせが変わるので、地層に含まれる放射性元素の比率と、その初期値から年代を推定することが可能である。
ただし、初期値を推定することは難しいので、精度はそれほど高くない。
*参考文献 1,2
まとめてしまうと以上になりますね。
初めて知ることだらけでなかなか時間がかかりましたが、だいぶ楽しく学べました。
参考文献1がなかなか楽しくて、ひとまず一読はしたのですが、今日スマホをいじっている間に、「水からトリチウムを分離できる吸収剤の開発に成功」という記事を見てちょっと感動したので、もう一つ深くまとめてみます。
参考文献1内の6章、身を守るための方法を考えようという記事で、除染方法等について書いてあります。
その中で、『トリチウムは水素の同位体ですから、水分子として存在した場合(H2OのHの片方がT、つまりHTOのような形)、ふつうの水と化学的には同じですので、イオン交換樹脂では取り除けないのです。福島第一原子力発電所でも除染できずにタンクに溜めているのは、トリチウムを含む水です。結局、トリチウムだけは、基準値以下に希釈して排水する以外に方法がありません(10)。』とあります。
ちなみに、記事内では、注釈10として、膨大なお金をかければトリチウムを分離できる旨が書かれています。
今回感動したのは、参考文献3です。
良くまとまっていて、なかなかエレガントな論文だと思いましたが、無謀にもまとめてみようと思います。
要素技術としては、酸化マンガン($H Mn_2 O_4$)を、水素イオンを含有する性質の強い、スピネル型構造でナノオーダーの粒子として結晶化した後、酸化水溶液と接触させて、水素イオン($H^+$)を吸収させる。
これを、人工汚染水に入れてトリチウム($T$)の濃度を時間経過とともに計測する。
結果として、人工汚染水のトリチウム濃度が、20分経過時に5500[kBq/L]から4000[kBq/L]まで減少した。
新規性としては、$T$が酸化マンガン容易に離れる性質を利用することで、吸収剤の再利用することで、吸収剤自体の体積が処理場で必要ないという点かなと思います。
以上!
ミクロの世界も、面白い!
<参考文献>
1. 放射線について考えてみよう
2. 年代測定法
3. Hideki Koyanaka and Hideo Miyatake
"Extracting Tritium from Water Using a Protonic Manganese Oxide Spinel"
Separation Science and Technology, Accepted author version posted online: 23 Apr 2015
2018年06月25日
No.17 東尋坊と恐竜博物館【アルバム】
こんばんわ。
僕の日本全国行きたいところリストのうちの一つ、東尋坊に行ってきました。
絶対にこんなところで自殺はしたくないと思いました。
海面にたどりつくまでに何回バウンドしながら落ちていくんでしょうね。
というか、落ちるって想像しただけでぞわぞわしますよね…



いやぁ、でも撮った写真見てみると危険な感じの写真がなかったので、本当のところはただ楽しかったんでしょうね!
日曜日は恐竜博物館に行ってきました。
図書館も併設されていて、だいぶ楽しめました。

地層の放射性物質の量と、半減期から年代を推定するらしいのですが、原子の壊変現象を初めて知りました。
たぶん昔の授業では聞いてたんでしょうけど、全然興味なくて覚えてなかったです。
すごい面白いですよね。コストの問題さえクリアしたら金の大量生産ができるようになるってことですよね。
パッと思いつくだけでも電線が変わったら世界が一気に変わりますよね。すごいワクワクしました。
どうでもいいついでに、いろいろ調べている間にアインシュタインがノーベル賞を取ったのって、相対性理論でなく、光電効果なんですね。恥ずかしながら初めて知りました…。
というかノーベル賞の授賞者とその分野ってあんまり覚えてないことに気が付きました。
ちゃんと知っとこう…。
あ、あとハイライトとしては、首が長くて頭の小さい竜脚類の首の骨がとても興味深かったです。

下側にあるちょびひげ、気になって結構考えてたんですけど、気道確保なんですかね。
考えてみたらキリンとかは別に下に凸には曲がらないですけど、どうやらこの子達の首は曲がるんですよね。
その時にちょびひげがないと、何もないのに自殺が完成してしまいますもんね。
その昔、ハンドルが一回転してて、ハンドルを切った瞬間にフロントブレーキがかかったマウンテンバイクを思い出しました。チャリンコで縦に一回転したのは後にも先にもその時だけです。
よろしかったら、ブログランキングの向上にご協力おねがいします。

カメラ男子ランキング
僕の日本全国行きたいところリストのうちの一つ、東尋坊に行ってきました。
絶対にこんなところで自殺はしたくないと思いました。
海面にたどりつくまでに何回バウンドしながら落ちていくんでしょうね。
というか、落ちるって想像しただけでぞわぞわしますよね…



いやぁ、でも撮った写真見てみると危険な感じの写真がなかったので、本当のところはただ楽しかったんでしょうね!
日曜日は恐竜博物館に行ってきました。
図書館も併設されていて、だいぶ楽しめました。

地層の放射性物質の量と、半減期から年代を推定するらしいのですが、原子の壊変現象を初めて知りました。
たぶん昔の授業では聞いてたんでしょうけど、全然興味なくて覚えてなかったです。
すごい面白いですよね。コストの問題さえクリアしたら金の大量生産ができるようになるってことですよね。
パッと思いつくだけでも電線が変わったら世界が一気に変わりますよね。すごいワクワクしました。
どうでもいいついでに、いろいろ調べている間にアインシュタインがノーベル賞を取ったのって、相対性理論でなく、光電効果なんですね。恥ずかしながら初めて知りました…。
というかノーベル賞の授賞者とその分野ってあんまり覚えてないことに気が付きました。
ちゃんと知っとこう…。
あ、あとハイライトとしては、首が長くて頭の小さい竜脚類の首の骨がとても興味深かったです。

下側にあるちょびひげ、気になって結構考えてたんですけど、気道確保なんですかね。
考えてみたらキリンとかは別に下に凸には曲がらないですけど、どうやらこの子達の首は曲がるんですよね。
その時にちょびひげがないと、何もないのに自殺が完成してしまいますもんね。
その昔、ハンドルが一回転してて、ハンドルを切った瞬間にフロントブレーキがかかったマウンテンバイクを思い出しました。チャリンコで縦に一回転したのは後にも先にもその時だけです。
よろしかったら、ブログランキングの向上にご協力おねがいします。
カメラ男子ランキング
2018年06月15日
No.16 人工知能と人工生命の基礎【備忘録】
こんばんわ。
人工生命の勉強をすると言ってからだいぶ時間がかかりました。
とりあえずの一冊目に選んだのは、「人工知能と人工生命の基礎」です。

だいぶ中身が濃くておすすめです。
完全に理解はできていないところなんですが、ひとまずは一週目完了です。
人工知能から、それに用いられる推論、ネットワーク、分子生物学、人工生命とグラデーションがかかって、人工知能→人工生命へと遡っていきます。
と、言いながらとりあえず興味があるところから読んでいったので作者の意図とはまた違ったバイアスがかかった概要です。
数学やデータがありながら、思考実験も多いというのが、ちょっと感動的でした。
僕の様に、まだ人工知能・人工生命の知識がインストールされていない初学者でもだいぶ楽しめました。
いや、やっぱり蟻のフェロモンは実装したいですね。
フェロモンの揮発性で、蟻の群れが最短ルートを通るようになるというものです。
スケボーマップを作って是非とも社会実装したいんですけどね…。
どうやら僕にはこらえ性がないようで、ちょっと挫折気味です。
あとは、参考文献の数が圧倒的でだいぶ楽しいです。その数123。ぞろ目!
論文を引用している場合、議論の余地など反論や、その反論に対する反論など、見解も述べられている点がとても参考になりました。
論文は、読んで、実装して、問題点を見つけていけるのが理想ですね。
ただ、英語の文献が多いんでTOEIC555の僕は四苦八苦してますが、なんとか「Evolving Virtual Creatures」を一周しましたが、ほぼ目を通した程度の理解です!笑
英語を読むだけで単語を覚えるのは、「30回同じ単語を目にすると理解する」と仮定した場合、TOEIC555点の私は語彙5000程度の僕は、250万語を読めば単語を覚えていくようになるはず!
参考「読むだけで単語を覚えるには洋書何冊必要?」
「英単語暗記プログラム」
と思いましたが、語彙測定結果は3000でした。TOEIC対策で増やして忘れた語彙数が2000なんでしょうね。
Evolving Virtual Creaturesが7,175語なので、読むだけで単語を覚えていけるようになるまであと92,825語です。繰り返し読みながら、知識を増やしていきましょう。
次は、The Oringins of Orderを狙っているのですが、Amazonで一万円…。お高いなぁ。
よろしかったら、ブログランキングの向上にご協力おねがいします。
手作り・DIYランキング
人工生命の勉強をすると言ってからだいぶ時間がかかりました。
とりあえずの一冊目に選んだのは、「人工知能と人工生命の基礎」です。
 |
新品価格 |
だいぶ中身が濃くておすすめです。
完全に理解はできていないところなんですが、ひとまずは一週目完了です。
人工知能から、それに用いられる推論、ネットワーク、分子生物学、人工生命とグラデーションがかかって、人工知能→人工生命へと遡っていきます。
と、言いながらとりあえず興味があるところから読んでいったので作者の意図とはまた違ったバイアスがかかった概要です。
数学やデータがありながら、思考実験も多いというのが、ちょっと感動的でした。
僕の様に、まだ人工知能・人工生命の知識がインストールされていない初学者でもだいぶ楽しめました。
いや、やっぱり蟻のフェロモンは実装したいですね。
フェロモンの揮発性で、蟻の群れが最短ルートを通るようになるというものです。
スケボーマップを作って是非とも社会実装したいんですけどね…。
どうやら僕にはこらえ性がないようで、ちょっと挫折気味です。
あとは、参考文献の数が圧倒的でだいぶ楽しいです。その数123。ぞろ目!
論文を引用している場合、議論の余地など反論や、その反論に対する反論など、見解も述べられている点がとても参考になりました。
論文は、読んで、実装して、問題点を見つけていけるのが理想ですね。
ただ、英語の文献が多いんでTOEIC555の僕は四苦八苦してますが、なんとか「Evolving Virtual Creatures」を一周しましたが、ほぼ目を通した程度の理解です!笑
英語を読むだけで単語を覚えるのは、「30回同じ単語を目にすると理解する」と仮定した場合、TOEIC555点の私は語彙5000程度の僕は、250万語を読めば単語を覚えていくようになるはず!
参考「読むだけで単語を覚えるには洋書何冊必要?」
「英単語暗記プログラム」
と思いましたが、語彙測定結果は3000でした。TOEIC対策で増やして忘れた語彙数が2000なんでしょうね。
Evolving Virtual Creaturesが7,175語なので、読むだけで単語を覚えていけるようになるまであと92,825語です。繰り返し読みながら、知識を増やしていきましょう。
次は、The Oringins of Orderを狙っているのですが、Amazonで一万円…。お高いなぁ。
よろしかったら、ブログランキングの向上にご協力おねがいします。
手作り・DIYランキング
2018年06月09日
No.15 モータドライバTB6643KQ過電流検出回路【テオヤンセンさんの動く城】
こんにちわ!
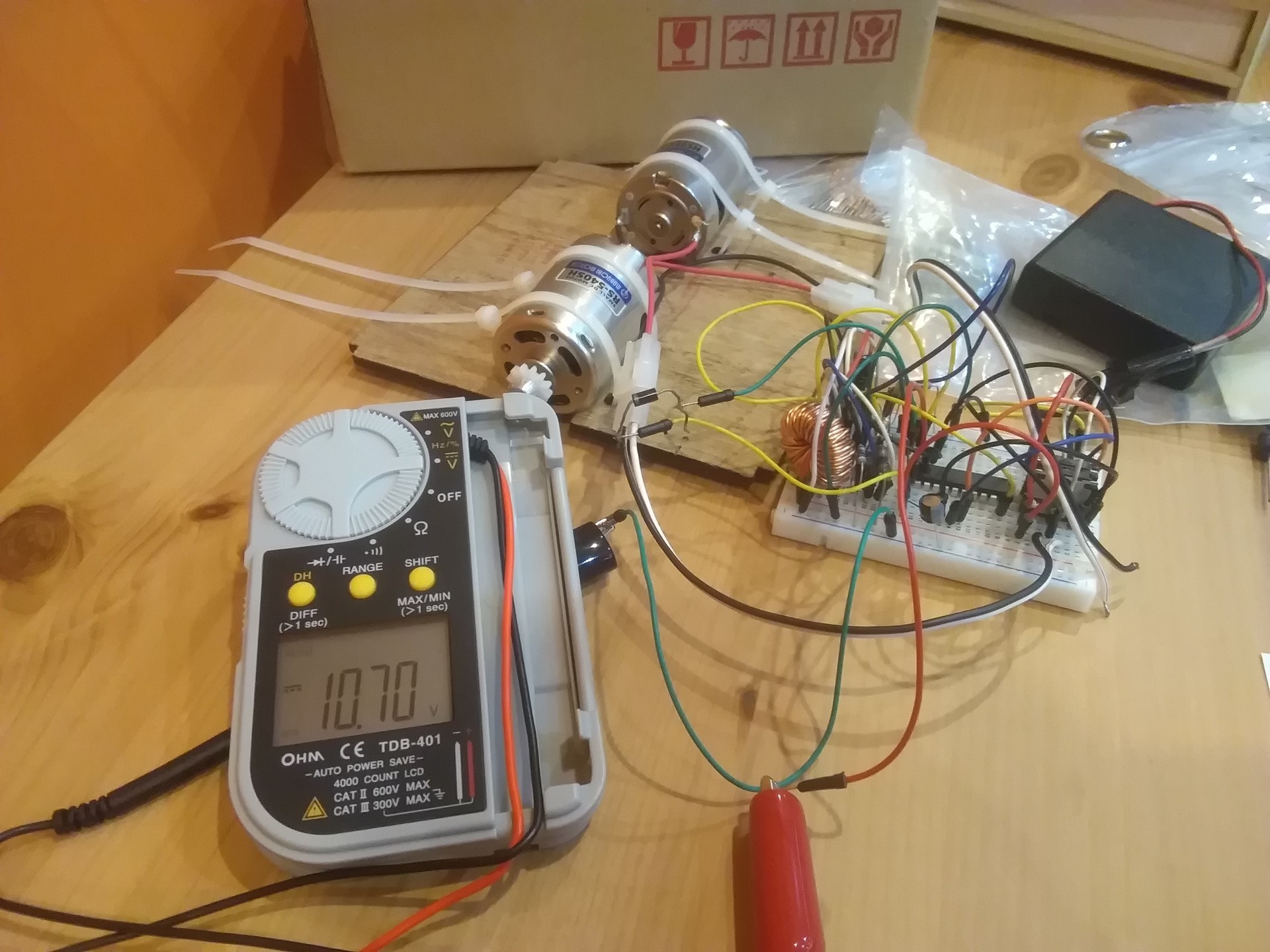
モータードライバTB6643KQを10.7 [ V ]でモーターを駆動しようとしているのですが、音がなりながらなかなか回ってくれません。
その原因と対策を考察していきたいと思います。
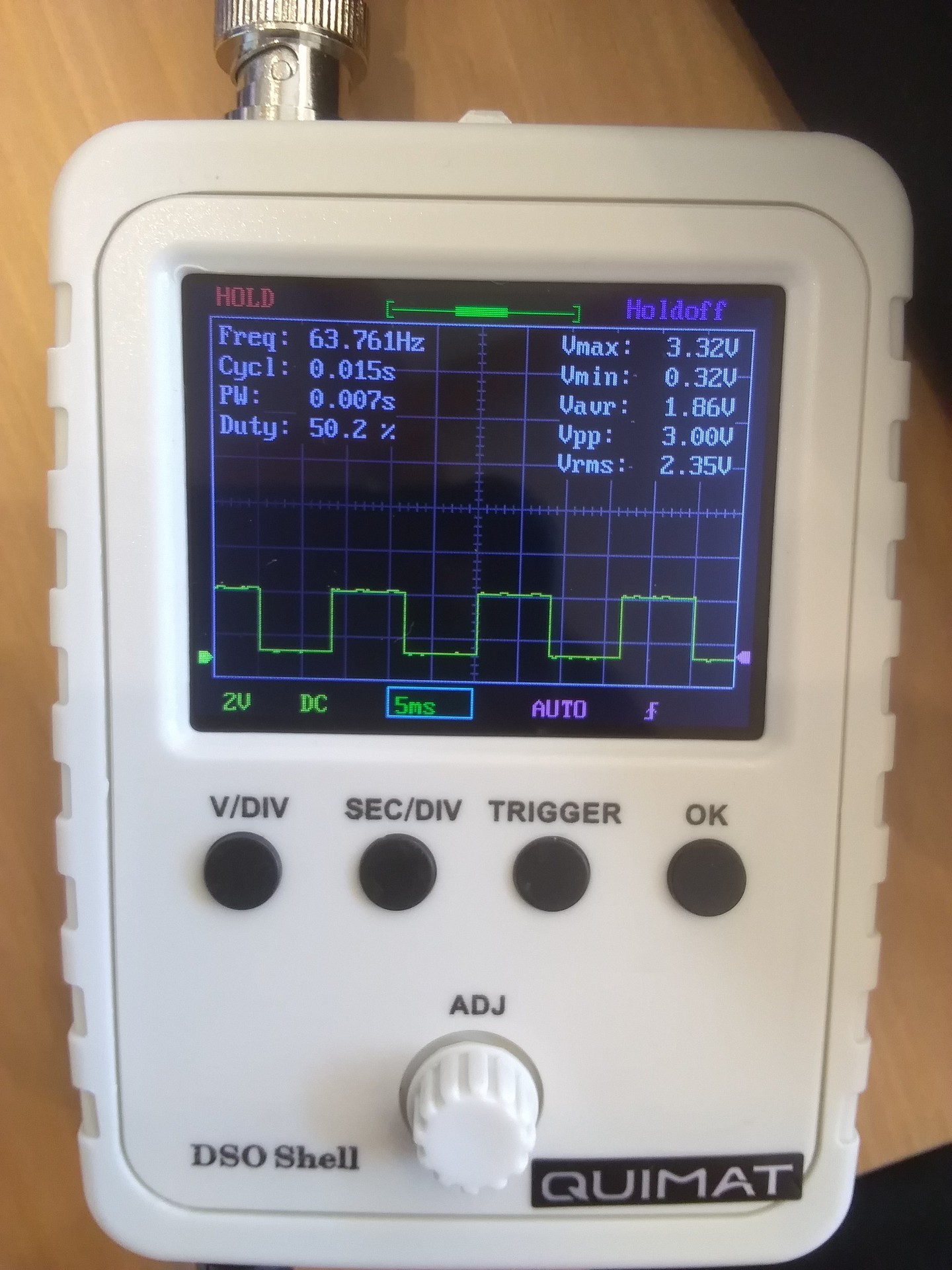
ハンディオシロを購入しました。

Quimat から出ています格安オシロのDSO Shellってやつです。
なんかよくわかってませんが、たぶん正規品は組み立てキットで、それを組み立てて販売しているものだと思われます。
計測器具まで自分で組み始めると、電源装置などを持っていない自分だと、何を信じていいのかわからなくなりそうだったので、組み立て品でぱっと買えるものを選びました。
アマゾンの以下の商品です。

あ!ちなみについてくる説明書は英語です。いじり倒して壊しても、4000円なら、凹む時間も短そうなので、よくわからないまま使っています。
基本的にはボタンを押す、ADJのつまみを回す。という操作でいろいろ調整していきます。
ボタンの左から順番に、縦軸のスケール、横軸のスケール、トリガー(一定周期のプロットを静止して表示するため)の設定、HOLDの順番になっています。
HOLD中に、縦軸のスケールの設定から抜けてから、ADJを回すと原点が上下移動。同様に横軸のスケールの設定から抜けてからADJを回すと原点が左右に移動となります。
4000円程度で、電気の流れが見えるってすごいですよね。
高専の頃に先生が壊して新品100万円のオシロを壊して、20万の中古を買ったって聞いてからというもの、オシロスコープは高級品だとばかり思っていたので、自分で手に入れるなんて、考えてもみませんでした。
まぁ、働きだしたので多少背伸びすれば先生がおっしゃってた中古オシロだったら買えるんですけどね。
ただ、食べていくのに困るだけで!
さて、そのオシロスコープで前の記事のモータードライブ回路が動かない原因を究明していきます。
まずは、ATTiny2313のPWMの波形を確認しましょう。
以下は、3.3V駆動のATTinyを128/255=0.50196...のデューティー比で出力した波形です。
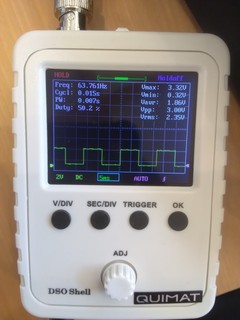
画像を撮っているときにいじりながら勉強していたので、1Cycleの時間が見にくいですが、僕はこれを16.7[msec]と読みました。
表示では、Cycleは15[ msec ]、Dutyが50.2[ % ]、Vmaxが3.32[ V ]でCycleについては微妙ですが、他は大体いいんではないでしょうか?結構きれいな矩形波がでてるんですね。
ちょっと感動です。
次はTB6643KQの出力波形です。
入力されるのは、先ほどのDuty比が50[ % ] のPWM波形です。

こちらは大体4 [ usec ]くらいでON,OFFを4~5回繰り返すのを、120[ usec ]周期で繰り返していますね。
モータードライブ用に昇圧回路を組んで、10.7[ V ]を供給しているはずが、8.27[ V ]がピークになっています。
以下にTB6643KQのデータシート内、過電流保護回路の部分を載せます。
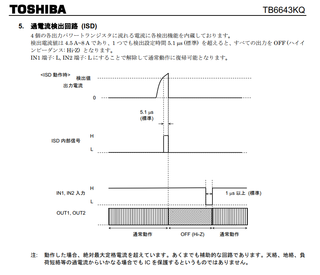
この回路が作動することは、基本的には推奨されておらず、
「4.5~8 [ A ]を超える電流を5.1 [ usec ]を超える時間、出力している場合、出力をOFF(高インピーダンス)にする。
通常動作に復帰するには、入力端子を両方ともLレベルにする。」
とあります。
オシロスコープの読み違いが、正直1.1[ usec ]程度はあると思います。つまり、5.1[usec]周期でON,OFFを繰り返しているとも考えられます。
前述のように、
1.TB6643の電源電圧よりも出力電圧の最大値が小さいこと
2.5.1[ usec ]周期でoffが繰り返される
の2点から、モーターの始動電流によって、過電流保護回路が作動しているものと推察されます。
ただ、0.12[ msec ]周期でこの現象が繰り返されるのはよくわかりません。
PWMの波形を見る限り、一旦作動した過電流検出回路はPWM波形の立下り後0.1 [ usec ]のタイミングまで作動し続けるはずなんですよね…。
0.12[msec]ごとにプログラムがループしてるんでしょうか?
さらに、Duty比100 [ % ]のモーター出力を載せます。
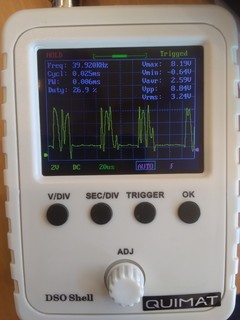
こちらは、過電流検出回路が発生する周期が56 [usec]程度とDuty比50 [ % ]に比べて短くなっています。
この辺がヒントになる気がします。
とりあえず、ATTinyのデータシートを読み込もうと思います…。
そもそもPWMを使って駆動しようとしていたのは、過電流検出回路にかからないように、TB6643KQから出力される電圧を下げようとしたからです。
しかし、ATTiny2313のPWMの出力波形が、そのままTB6643KQの出力波形になろうとして、過電流検出回路に引っかかってしまています。
これは、TB6643KQの分解能が優秀だからです。(もうちょっと、ATTiny2313のデータシートを読み込んで確認しよと思っています。)
とりあえずは、PWM回路を直接TB6643KQに入れるのではなく、ローパスフィルタにより平滑化して入れてみようと思います。
モータードライバTB6643KQを10.7 [ V ]でモーターを駆動しようとしているのですが、音がなりながらなかなか回ってくれません。
その原因と対策を考察していきたいと思います。
1.オシロスコープ
ハンディオシロを購入しました。

Quimat から出ています格安オシロのDSO Shellってやつです。
なんかよくわかってませんが、たぶん正規品は組み立てキットで、それを組み立てて販売しているものだと思われます。
計測器具まで自分で組み始めると、電源装置などを持っていない自分だと、何を信じていいのかわからなくなりそうだったので、組み立て品でぱっと買えるものを選びました。
アマゾンの以下の商品です。
 |
Quimat 2.4"TFT デジタル オシロスコープ(組立完成品) 0-200KHz 5mV/Div-20V/Div感度 プローブ付き 9V DC DSOオシロスコープ Q15001 新品価格 |
あ!ちなみについてくる説明書は英語です。いじり倒して壊しても、4000円なら、凹む時間も短そうなので、よくわからないまま使っています。
基本的にはボタンを押す、ADJのつまみを回す。という操作でいろいろ調整していきます。
ボタンの左から順番に、縦軸のスケール、横軸のスケール、トリガー(一定周期のプロットを静止して表示するため)の設定、HOLDの順番になっています。
HOLD中に、縦軸のスケールの設定から抜けてから、ADJを回すと原点が上下移動。同様に横軸のスケールの設定から抜けてからADJを回すと原点が左右に移動となります。
4000円程度で、電気の流れが見えるってすごいですよね。
高専の頃に先生が壊して新品100万円のオシロを壊して、20万の中古を買ったって聞いてからというもの、オシロスコープは高級品だとばかり思っていたので、自分で手に入れるなんて、考えてもみませんでした。
まぁ、働きだしたので多少背伸びすれば先生がおっしゃってた中古オシロだったら買えるんですけどね。
ただ、食べていくのに困るだけで!
さて、そのオシロスコープで前の記事のモータードライブ回路が動かない原因を究明していきます。
2.ATTiny2313のPWM波形
まずは、ATTiny2313のPWMの波形を確認しましょう。
以下は、3.3V駆動のATTinyを128/255=0.50196...のデューティー比で出力した波形です。
画像を撮っているときにいじりながら勉強していたので、1Cycleの時間が見にくいですが、僕はこれを16.7[msec]と読みました。
表示では、Cycleは15[ msec ]、Dutyが50.2[ % ]、Vmaxが3.32[ V ]でCycleについては微妙ですが、他は大体いいんではないでしょうか?結構きれいな矩形波がでてるんですね。
ちょっと感動です。
3.TB6643KQの出力波形
次はTB6643KQの出力波形です。
入力されるのは、先ほどのDuty比が50[ % ] のPWM波形です。
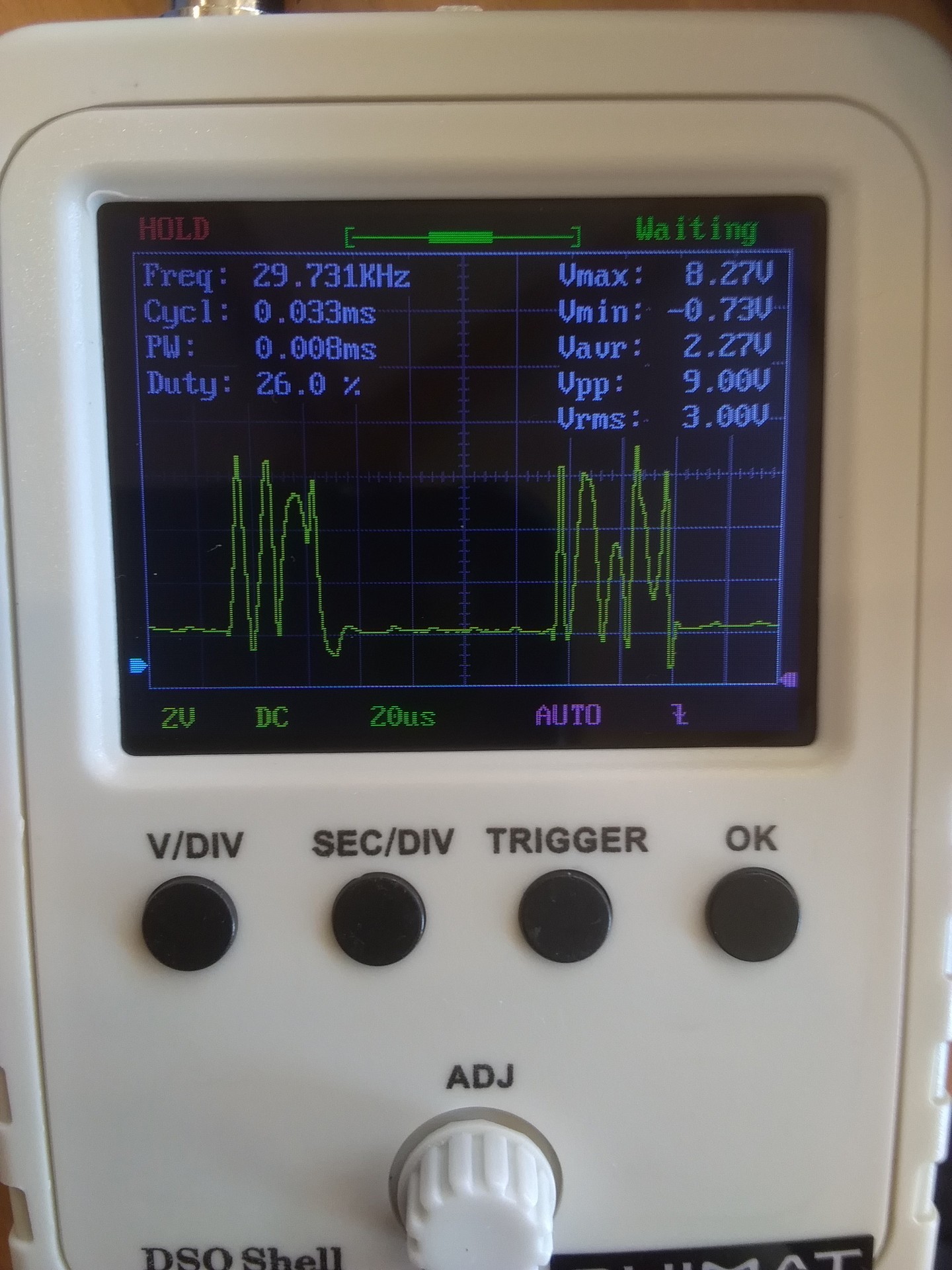
こちらは大体4 [ usec ]くらいでON,OFFを4~5回繰り返すのを、120[ usec ]周期で繰り返していますね。
モータードライブ用に昇圧回路を組んで、10.7[ V ]を供給しているはずが、8.27[ V ]がピークになっています。
4.TB6643KQの過電流検出回路
以下にTB6643KQのデータシート内、過電流保護回路の部分を載せます。
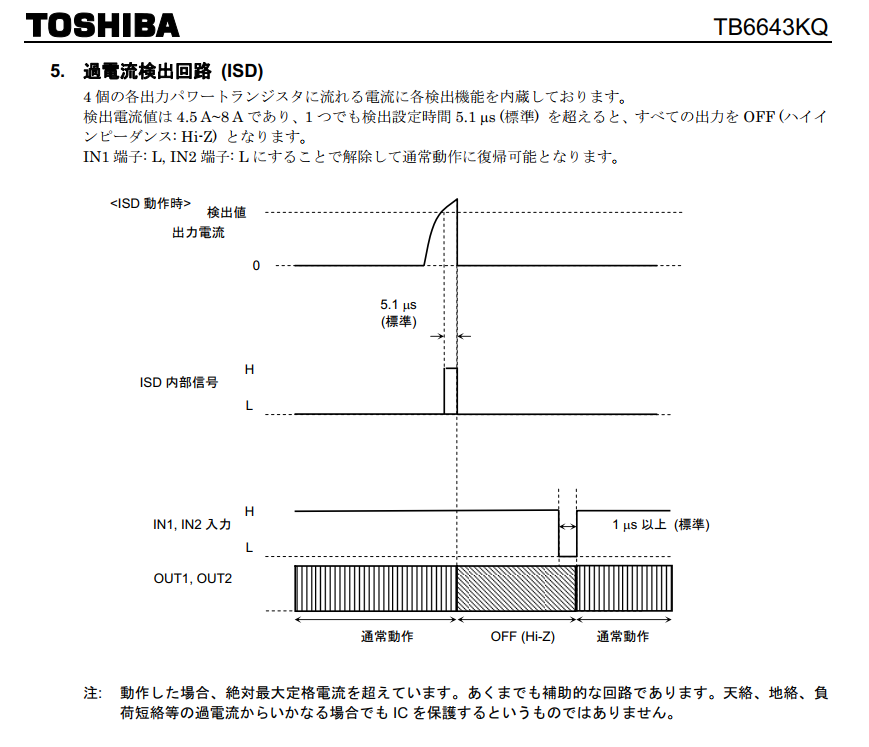
この回路が作動することは、基本的には推奨されておらず、
「4.5~8 [ A ]を超える電流を5.1 [ usec ]を超える時間、出力している場合、出力をOFF(高インピーダンス)にする。
通常動作に復帰するには、入力端子を両方ともLレベルにする。」
とあります。
5.考察
オシロスコープの読み違いが、正直1.1[ usec ]程度はあると思います。つまり、5.1[usec]周期でON,OFFを繰り返しているとも考えられます。
前述のように、
1.TB6643の電源電圧よりも出力電圧の最大値が小さいこと
2.5.1[ usec ]周期でoffが繰り返される
の2点から、モーターの始動電流によって、過電流保護回路が作動しているものと推察されます。
ただ、0.12[ msec ]周期でこの現象が繰り返されるのはよくわかりません。
PWMの波形を見る限り、一旦作動した過電流検出回路はPWM波形の立下り後0.1 [ usec ]のタイミングまで作動し続けるはずなんですよね…。
0.12[msec]ごとにプログラムがループしてるんでしょうか?
さらに、Duty比100 [ % ]のモーター出力を載せます。
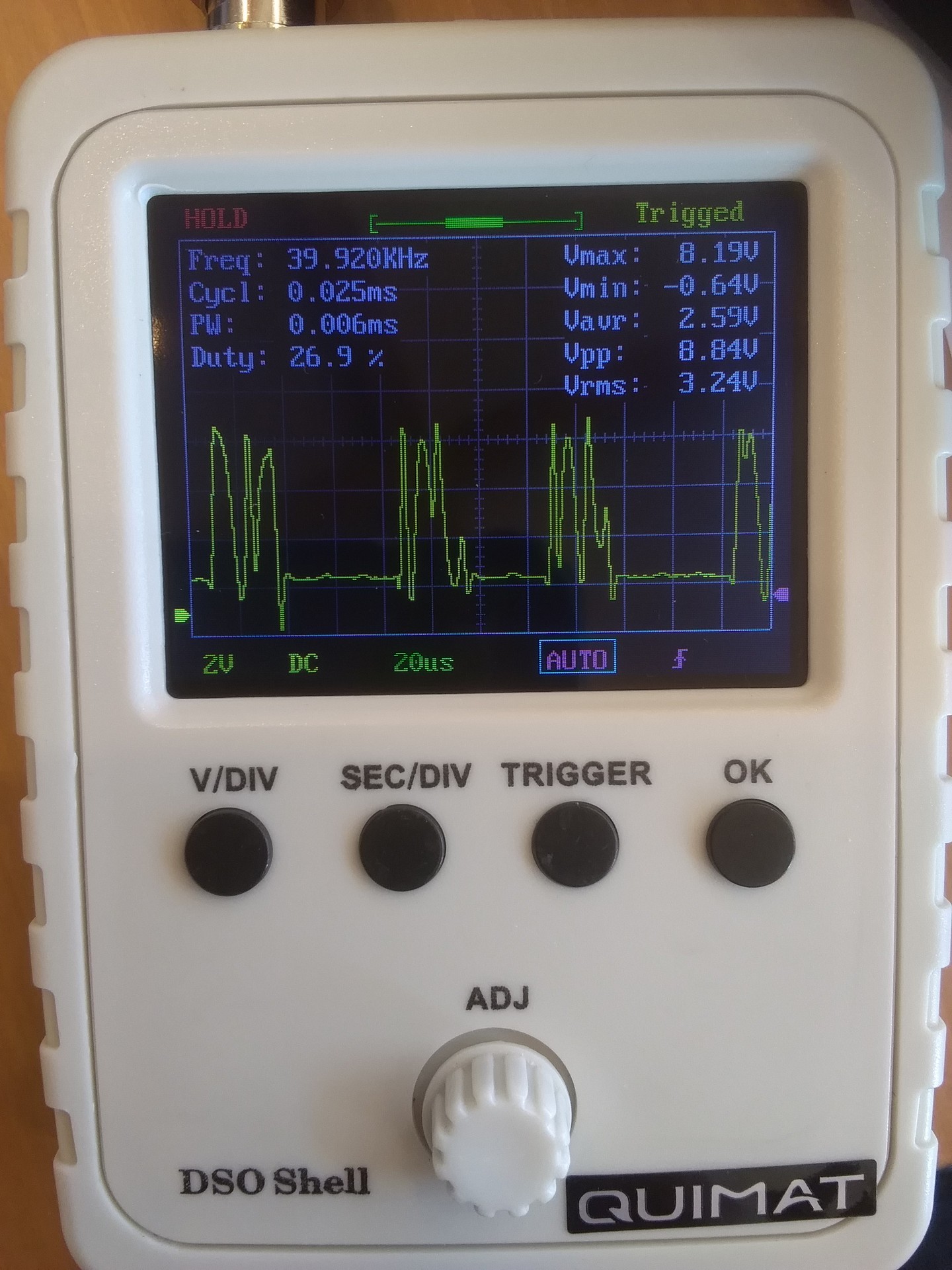
こちらは、過電流検出回路が発生する周期が56 [usec]程度とDuty比50 [ % ]に比べて短くなっています。
この辺がヒントになる気がします。
とりあえず、ATTinyのデータシートを読み込もうと思います…。
6.対策
そもそもPWMを使って駆動しようとしていたのは、過電流検出回路にかからないように、TB6643KQから出力される電圧を下げようとしたからです。
しかし、ATTiny2313のPWMの出力波形が、そのままTB6643KQの出力波形になろうとして、過電流検出回路に引っかかってしまています。
これは、TB6643KQの分解能が優秀だからです。(もうちょっと、ATTiny2313のデータシートを読み込んで確認しよと思っています。)
とりあえずは、PWM回路を直接TB6643KQに入れるのではなく、ローパスフィルタにより平滑化して入れてみようと思います。
2018年06月08日
No.14 カメラのセンサについて【備忘録】
こんばんわ。
お久しぶりです。
なんだか仕事がバタバタしていて、東京まで2往復していました。
出張があると、それを取り返すために残業して…。
負のサイクルが続いていきますね。
そんな出張の道中、コンデジが欲しくなっていろいろ調べたので、それについてまとめたいと思います。
CCDとCMOSについては理解したのですが、MOSについては理解できてません。
中途半端といえば中途半端なのですが、ドツボにはまる前にひとまず記しときます。
(注記)現在鋭意製作中です。

*wikipedia「個体撮像素子」より
特徴としては、
1.構成はアナログ回路で、バッファが一つ。
2.原理的にすべての素子が同じタイミングで露光される。
3.スミアが発生する。
の3つがあります。
原理については、3章をご参考ください。
ソニーが実用化して、育てた!って感じなので、ソニーの開発秘話がとても面白かったです。
やっぱり、熱量のある技術文書はそれだけで面白いし、感動的ですよね。
1967年 磁気バブルメモリが開発される
1969年 磁気バブルメモリと同様の半導体メモリを開発しようとし、Willard BoyleとGeorge E.SmithがCCDの構造、動作を発明。同時に基本的な応用アイデアを得たとされる。
1970年 ISSCCが発表した、MOS DRAMに淘汰される形で、CCDはイメージセンサへと方向転換
1972年 イメージセンサとしても道を断たれる
1974年 Fairchild SemiconductorがCCDの撮像素子を開発
当時の新規性としては、カラービデオ撮像に対応できる画素数とRGBのうち特にBに必要な受講感度を有する撮像素子の開発にあった。
1979年 ソニーが実用感度を持つCCD撮像素子ICX008を開発
1989年 ソニーがパスポートサイズハンディカム(CCD-TR56)を発売、爆発的ヒット
1990年 HDテレビ・カメラへのCCDの導入。
(1990年代に、撮像管からCCDに主流の撮像素子が入れ替わる)
2009年CCDの発明でWillard BoyleとGeorge E.Smithがノーベル物理学賞を受賞
*参考文献1~6
参考文献
1.「さまざまなイメージセンサー」
2.「CCDイメージセンサーの歴史」
3.「開発秘話:CCDイメージセンサー
4.「ソニーセミコンダックタソリューションズ株式会社」
5.越智成之(2013)「イメージセンサの技術と実用化戦略」東京電機大学出版局
6. 1978年 11万画素CCD撮像素子商品化(ソニー)
よろしかったら、ブログランキングの向上にご協力おねがいします。

ガジェットランキング
お久しぶりです。
なんだか仕事がバタバタしていて、東京まで2往復していました。
出張があると、それを取り返すために残業して…。
負のサイクルが続いていきますね。
そんな出張の道中、コンデジが欲しくなっていろいろ調べたので、それについてまとめたいと思います。
CCDとCMOSについては理解したのですが、MOSについては理解できてません。
中途半端といえば中途半端なのですが、ドツボにはまる前にひとまず記しときます。
(注記)現在鋭意製作中です。
1.CCD
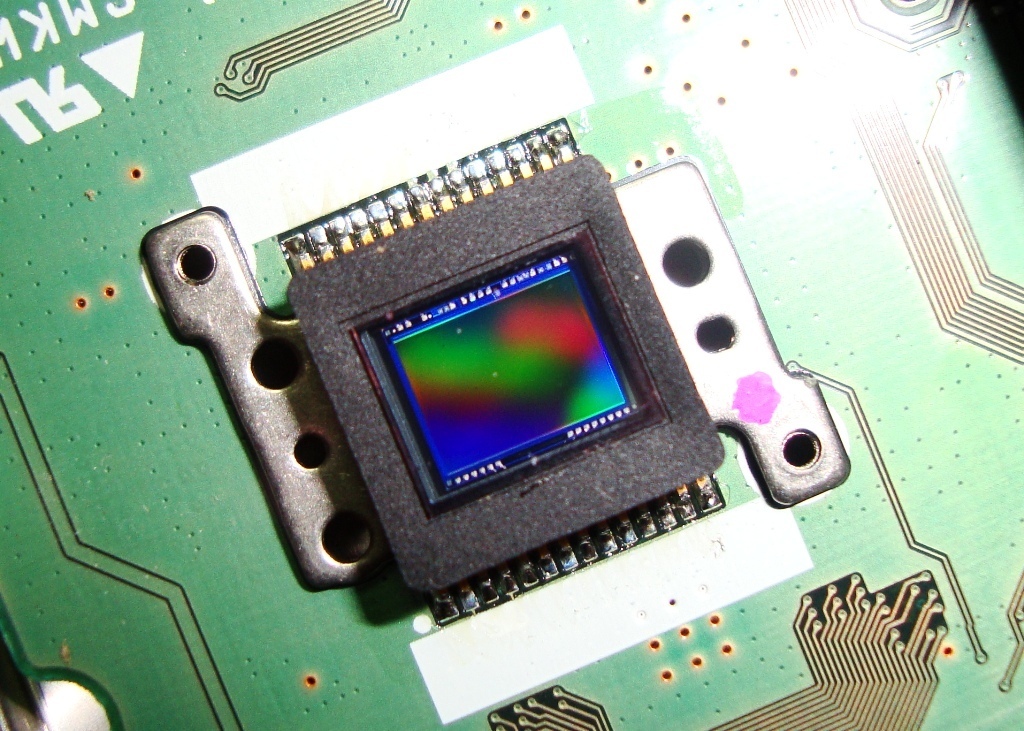
*wikipedia「個体撮像素子」より
特徴としては、
1.構成はアナログ回路で、バッファが一つ。
2.原理的にすべての素子が同じタイミングで露光される。
3.スミアが発生する。
の3つがあります。
原理については、3章をご参考ください。
ソニーが実用化して、育てた!って感じなので、ソニーの開発秘話がとても面白かったです。
やっぱり、熱量のある技術文書はそれだけで面白いし、感動的ですよね。
1967年 磁気バブルメモリが開発される
1969年 磁気バブルメモリと同様の半導体メモリを開発しようとし、Willard BoyleとGeorge E.SmithがCCDの構造、動作を発明。同時に基本的な応用アイデアを得たとされる。
1970年 ISSCCが発表した、MOS DRAMに淘汰される形で、CCDはイメージセンサへと方向転換
1972年 イメージセンサとしても道を断たれる
1974年 Fairchild SemiconductorがCCDの撮像素子を開発
当時の新規性としては、カラービデオ撮像に対応できる画素数とRGBのうち特にBに必要な受講感度を有する撮像素子の開発にあった。
1979年 ソニーが実用感度を持つCCD撮像素子ICX008を開発
1989年 ソニーがパスポートサイズハンディカム(CCD-TR56)を発売、爆発的ヒット
1990年 HDテレビ・カメラへのCCDの導入。
(1990年代に、撮像管からCCDに主流の撮像素子が入れ替わる)
2009年CCDの発明でWillard BoyleとGeorge E.Smithがノーベル物理学賞を受賞
*参考文献1~6
参考文献
1.「さまざまなイメージセンサー」
2.「CCDイメージセンサーの歴史」
3.「開発秘話:CCDイメージセンサー
4.「ソニーセミコンダックタソリューションズ株式会社」
5.越智成之(2013)「イメージセンサの技術と実用化戦略」東京電機大学出版局
6. 1978年 11万画素CCD撮像素子商品化(ソニー)
よろしかったら、ブログランキングの向上にご協力おねがいします。
ガジェットランキング
2018年06月03日
No.13 ブレッドボードからユニバーサル基板に移植【テオヤンセンさんの動く城】
こんにちわ。
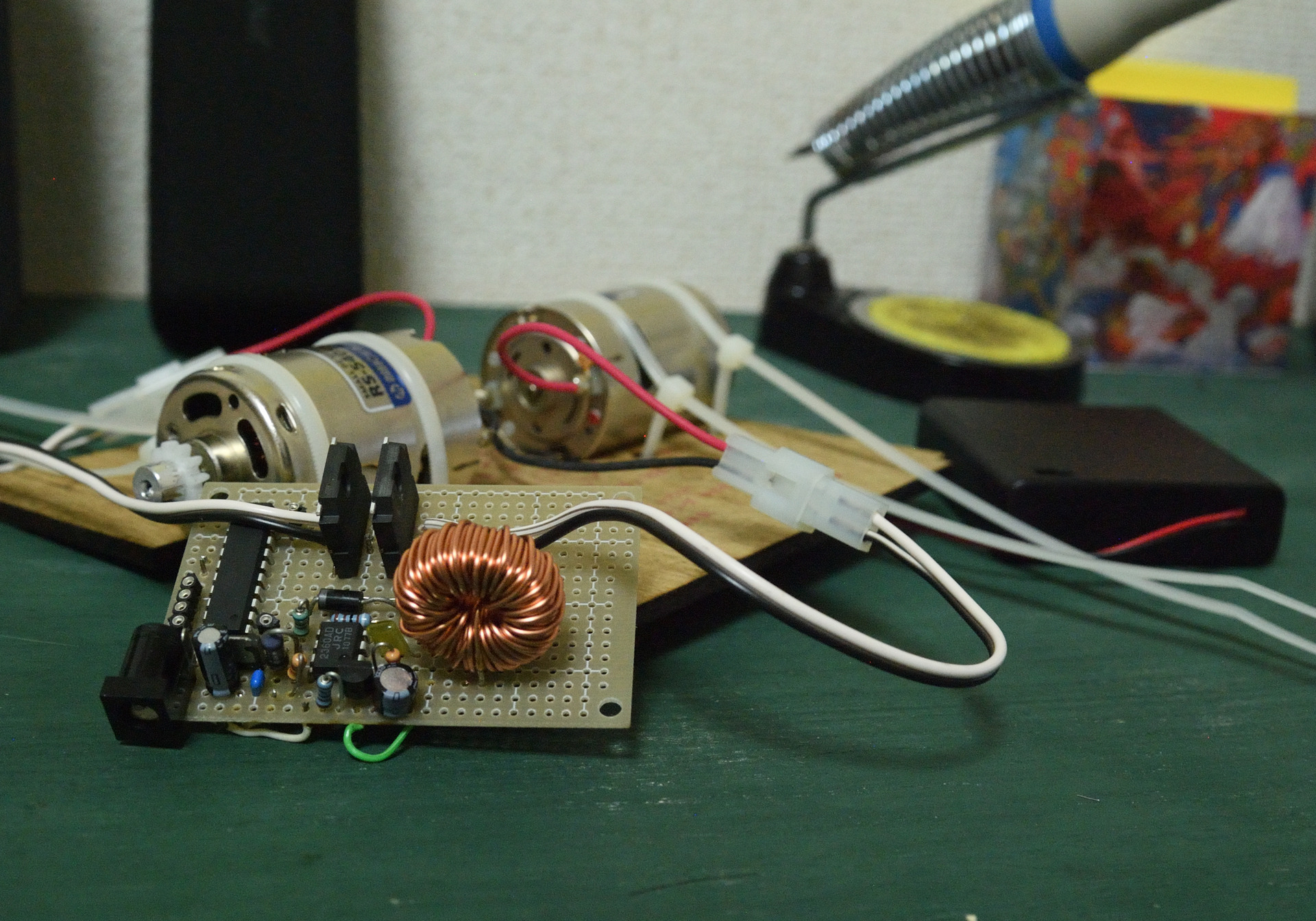
本日は、モータードライブの回路をブレッドボードからユニバーサル基板に移植しました。
実験的にはきちんと数値も出ていたのですが、持ち運び時にショートが気になっていたので、どうせならということで。
久しぶりのハンダ作業だったのでだいぶ楽しめました。
これくらいなら実態配線図をきちんと書かなくても大丈夫と思っていたのですが、結局書いていたほうがきれいに早くできた気がします。
きちんと図面で残していくのは、技術を積み上げていく上でも大事ですよね…。
配線図はこちらになります。
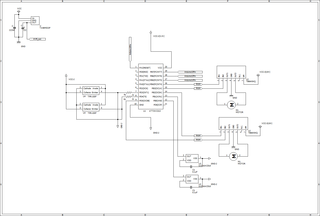
昇圧部分はNJM2360のアプリケーションシートの昇圧・大電力編です。
まだ各種センサー類は取り付けていません。とうか結構迷ってます。ライントレースだけならパッとできる気がするんですけどね。それじゃあんまり面白くはないですもんねぇ…
電気部品の中では外観的にゲジゲジが一番好きです。コイルも捨てがたいですが、扱いが難しいですよね…。
ていうか、ずっと前に200Vの昇圧回路作っているときに感電してからコイル触るのちょっとトラウマです。
本日は、モータードライブの回路をブレッドボードからユニバーサル基板に移植しました。
実験的にはきちんと数値も出ていたのですが、持ち運び時にショートが気になっていたので、どうせならということで。
久しぶりのハンダ作業だったのでだいぶ楽しめました。
これくらいなら実態配線図をきちんと書かなくても大丈夫と思っていたのですが、結局書いていたほうがきれいに早くできた気がします。
きちんと図面で残していくのは、技術を積み上げていく上でも大事ですよね…。
配線図はこちらになります。
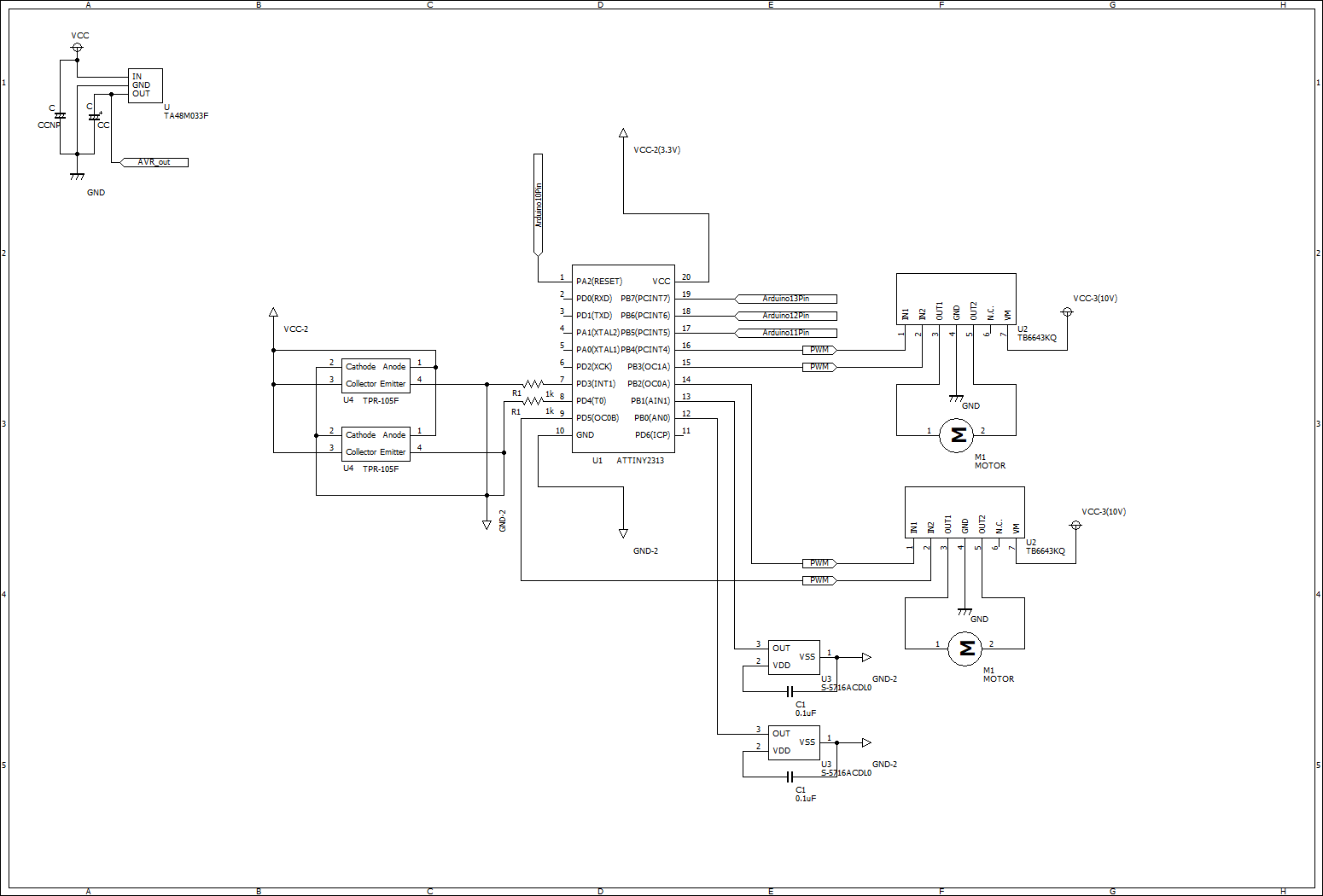
昇圧部分はNJM2360のアプリケーションシートの昇圧・大電力編です。
まだ各種センサー類は取り付けていません。とうか結構迷ってます。ライントレースだけならパッとできる気がするんですけどね。それじゃあんまり面白くはないですもんねぇ…
電気部品の中では外観的にゲジゲジが一番好きです。コイルも捨てがたいですが、扱いが難しいですよね…。
ていうか、ずっと前に200Vの昇圧回路作っているときに感電してからコイル触るのちょっとトラウマです。
2018年06月02日
No.12 人口知能と人工生命【備忘録】
こんにちわ。
テオヤンセンさんのリンク機構を作っている内に、テオヤンセンさんが研究しているのは人工生命と呼ばれる分野であることを知りました。
最近よく耳にする人口知能なのですが、人工生命とだいぶ近い研究分野のようで、知ったことをきちんとまとめておきたいと思います。
テオヤンセンさんが一体何を目指しているのかを知るのは、このリンク機構を作るうえで、また先に進むためにも大切なことだと思います。
人工知能(AI)と人工生命(AL)、厳密な定義は明文化が難しいようですが、大きな違いは、研究対象とする機能、アプローチ、適用方法の3つの違いがあるようです。
研究対象は、知能か生命かの違いがあり、脳の部位で例えるなら、大脳新皮質などの高度な知能にフォーカスしているのに対して、ALはもっと原始的な、脳幹が司るような部分で、研究対象としては1個体にこだわらず、群知能や粘菌などを含む自然知能であるという違いがあるようです。
まだ小さいときに、北九州の恐竜博物館に行ったときに恐竜の方が脳みそが大きいのに人間の方が知性が上ということに疑問を持ったことがありました。そのことをふと思い出しましたね…。
あの時きちんとその疑問に対して調べるようなことがあったら、工学系の人間ではなく、医学系の人間になっていたんですかね!
2つ目のアプローチの違いですが、これについてはあまり消化できてません。笑
以下抜粋になります。
”二つ目は、「アプローチ」の違いだ。一つ目の違いと重複するが、AIは意識的に上から指令を出すようなトップダウン型、ALifeは経験などを基に無意識的に下からたち起こってくるようなボトムアップ型のアプローチとして知られている。なお深層学習をロボットに応用する際には、ロボットの身体的なセンサー情報と、ロボットの視覚情報を融合させるという、ボトムアップとトップダウンの融合的アプローチが注目を集めている。”
いろいろ調べていて、ALが実際に手を動かし作ってみながら生命を研究するというのは理解しました。しかし、それに対するAIの研究手法を自分の言葉で説明することができませんね…。
これはおいおい、AIやALについて理解が進んできたらまとめることとします。
3つ目が適用方法の違いです。
日本語では、AIは「学習」でALは「進化」です。要は、考える時間のオーダーが違います。
AIは深層学習に代表されるアルゴリズムが有名なのに対して、ALは遺伝的アルゴリズムが代表的なアルゴリズムです。
高専に行っているときに、人工知能という科目で遺伝的アルゴリズムを用いて、循環セールスマン問題を解いたことがあるのですが、どうやら人工生命の領域だったようです。
なんとなく、釈然としない思いが3年越しで起こりました。いや、だからなんだって話なんですけど。笑
ということで、まぁ大まかな外観は理解することができたので、ひとまず基礎になる本を読んでみたいと思います。
今回の内容はほぼ、「人口生命(ALife)とは何か」 の記事からの焼き直しです。
何卒、新規性に欠けることをご容赦ください。
よろしかったら、ブログランキングの向上にご協力おねがいします。
手作り・DIYランキング
テオヤンセンさんのリンク機構を作っている内に、テオヤンセンさんが研究しているのは人工生命と呼ばれる分野であることを知りました。
最近よく耳にする人口知能なのですが、人工生命とだいぶ近い研究分野のようで、知ったことをきちんとまとめておきたいと思います。
テオヤンセンさんが一体何を目指しているのかを知るのは、このリンク機構を作るうえで、また先に進むためにも大切なことだと思います。
人工知能(AI)と人工生命(AL)、厳密な定義は明文化が難しいようですが、大きな違いは、研究対象とする機能、アプローチ、適用方法の3つの違いがあるようです。
研究対象は、知能か生命かの違いがあり、脳の部位で例えるなら、大脳新皮質などの高度な知能にフォーカスしているのに対して、ALはもっと原始的な、脳幹が司るような部分で、研究対象としては1個体にこだわらず、群知能や粘菌などを含む自然知能であるという違いがあるようです。
まだ小さいときに、北九州の恐竜博物館に行ったときに恐竜の方が脳みそが大きいのに人間の方が知性が上ということに疑問を持ったことがありました。そのことをふと思い出しましたね…。
あの時きちんとその疑問に対して調べるようなことがあったら、工学系の人間ではなく、医学系の人間になっていたんですかね!
2つ目のアプローチの違いですが、これについてはあまり消化できてません。笑
以下抜粋になります。
”二つ目は、「アプローチ」の違いだ。一つ目の違いと重複するが、AIは意識的に上から指令を出すようなトップダウン型、ALifeは経験などを基に無意識的に下からたち起こってくるようなボトムアップ型のアプローチとして知られている。なお深層学習をロボットに応用する際には、ロボットの身体的なセンサー情報と、ロボットの視覚情報を融合させるという、ボトムアップとトップダウンの融合的アプローチが注目を集めている。”
いろいろ調べていて、ALが実際に手を動かし作ってみながら生命を研究するというのは理解しました。しかし、それに対するAIの研究手法を自分の言葉で説明することができませんね…。
これはおいおい、AIやALについて理解が進んできたらまとめることとします。
3つ目が適用方法の違いです。
日本語では、AIは「学習」でALは「進化」です。要は、考える時間のオーダーが違います。
AIは深層学習に代表されるアルゴリズムが有名なのに対して、ALは遺伝的アルゴリズムが代表的なアルゴリズムです。
高専に行っているときに、人工知能という科目で遺伝的アルゴリズムを用いて、循環セールスマン問題を解いたことがあるのですが、どうやら人工生命の領域だったようです。
なんとなく、釈然としない思いが3年越しで起こりました。いや、だからなんだって話なんですけど。笑
ということで、まぁ大まかな外観は理解することができたので、ひとまず基礎になる本を読んでみたいと思います。
今回の内容はほぼ、「人口生命(ALife)とは何か」 の記事からの焼き直しです。
何卒、新規性に欠けることをご容赦ください。
よろしかったら、ブログランキングの向上にご協力おねがいします。
手作り・DIYランキング
2018年05月28日
No.11 モータードライブに用いる昇圧回路【テオヤンセンさんの動く城】
こんにちわ。
今回は、ブレッドボードでNJM2360を用いた昇圧回路を作りました。
アプリケーションノートと、こちらのサイトを見ながら設計値を決めました。
遠軽情報技術

今回は、乾電池4本6[V]の入力から10.5[V],1500[mA]で設計したので、だいぶ良い感じですね。
カラー抵抗の規格でまぁこれくらいの精度です。
実際には可変抵抗を使って、出力電圧を変化させる方が良いとは思います。
その昔、ニキシー管時計を作った際に挫折したチョッパ回路です。
チョッパ回路はコイルに発生する逆起電力を用います。
なので、Δtを小さくしていけば大きな電圧が得られることになります。
ただ、チョッパ回路の入力と出力の関係でいえば、以下のサイトがとても分かりやすいです。
パワーエレクトロニクス「http://energychord.com/children/energy/pe/dcdc/contents/dcdc_chopper_duty.html」
入力する電圧がわかれば、出力はスイッチングのデューティー比のみ決めてしまえば、出力は定まることになります。
NJM2360のデューティー比はタイミングキャパシタで決まることになります。
厳密には、タイミングキャパシタでRSフリップフロップを発振させて、コイルに入力される電圧のデューティー比を決定します。
ちなみに、持っていた470μFのコンデンサを用いたところ、コンパレーターに何も入れず、入力に6.27[V]を入れると、出てきた出力は30.20[V]でした。
それを、分圧して、1.25[V]と比較して、RSフリップフロップの発振を停止させることで、見た目の電圧を下げて10.5[V]を得ます。
まとめると、フリップフロップで発振させて、コイルの逆起電力で高い電圧を得たのちに、それをさらにPWM制御のように降圧させて、任意の電圧を得ます。
作った10[V]はモータードライブに使います。
用いるモータードライブは、TB6643KQですが、どうにも上手く動きません…。
はい…結局誘導起電力ですね。今回は、始動電流がばかでかくなって、保護回路が働いているみたいですね…
ひとまずユニバーサル基板に置き換えてPWMで始動してみようと思います。
よろしかったら、ブログランキングの向上にご協力おねがいします。
手作り・DIYランキング
今回は、ブレッドボードでNJM2360を用いた昇圧回路を作りました。
1.参考サイトと結果
アプリケーションノートと、こちらのサイトを見ながら設計値を決めました。
遠軽情報技術
今回は、乾電池4本6[V]の入力から10.5[V],1500[mA]で設計したので、だいぶ良い感じですね。
カラー抵抗の規格でまぁこれくらいの精度です。
実際には可変抵抗を使って、出力電圧を変化させる方が良いとは思います。
2.チョッパ回路動作原理
その昔、ニキシー管時計を作った際に挫折したチョッパ回路です。
チョッパ回路はコイルに発生する逆起電力を用います。
V=-L(Δi/Δt)
なので、Δtを小さくしていけば大きな電圧が得られることになります。
ただ、チョッパ回路の入力と出力の関係でいえば、以下のサイトがとても分かりやすいです。
パワーエレクトロニクス「http://energychord.com/children/energy/pe/dcdc/contents/dcdc_chopper_duty.html」
入力する電圧がわかれば、出力はスイッチングのデューティー比のみ決めてしまえば、出力は定まることになります。
NJM2360のデューティー比はタイミングキャパシタで決まることになります。
厳密には、タイミングキャパシタでRSフリップフロップを発振させて、コイルに入力される電圧のデューティー比を決定します。
ちなみに、持っていた470μFのコンデンサを用いたところ、コンパレーターに何も入れず、入力に6.27[V]を入れると、出てきた出力は30.20[V]でした。
それを、分圧して、1.25[V]と比較して、RSフリップフロップの発振を停止させることで、見た目の電圧を下げて10.5[V]を得ます。
まとめると、フリップフロップで発振させて、コイルの逆起電力で高い電圧を得たのちに、それをさらにPWM制御のように降圧させて、任意の電圧を得ます。
3.モータードライブ
作った10[V]はモータードライブに使います。
用いるモータードライブは、TB6643KQですが、どうにも上手く動きません…。
はい…結局誘導起電力ですね。今回は、始動電流がばかでかくなって、保護回路が働いているみたいですね…
ひとまずユニバーサル基板に置き換えてPWMで始動してみようと思います。
よろしかったら、ブログランキングの向上にご協力おねがいします。
手作り・DIYランキング
2018年05月26日
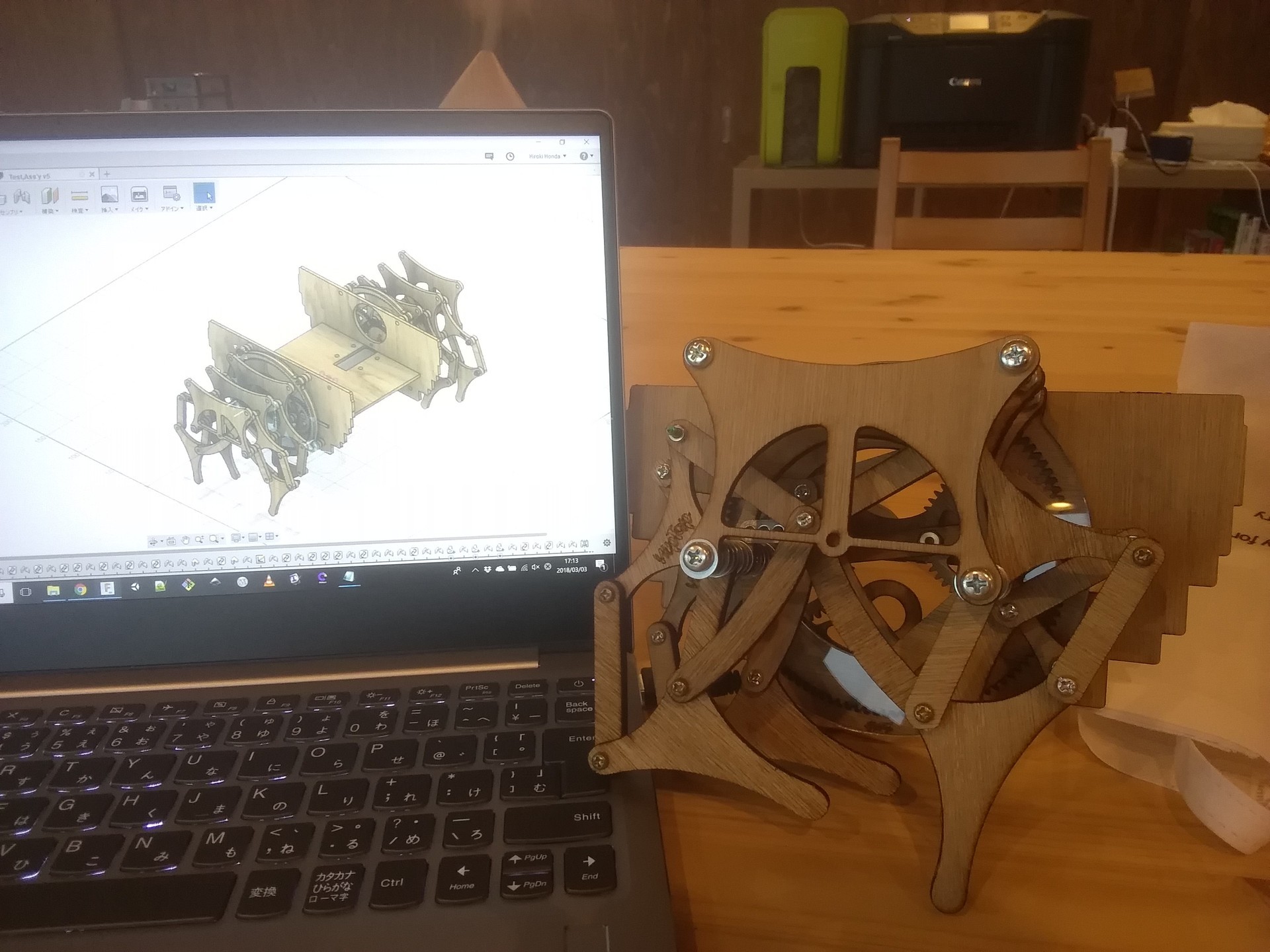
No.10 メカ要素の現実化【テオヤンセンさんの動く城】
節の出力
テオヤンセンさんのリンク機構の節をレーザープリンタで出力しました。
結構木材の端材を出しましました。
まぁ、ちょっと前には出力が終わってたんですけどね!
で、これ動かしてみた感じは、結構するする動いてくれますね。
手前のリンク機構と奥のリンク機構の間の距離合わせで結構抵抗がかわるので、量産するならば、冶具を作る必要はありますね。
節の出力は、言ってしまえば穴位置があっていれば、現状大した問題にはなりません。最終的に動かしたときにきちんと検証してみようと思います。
歯車の出力
遊星歯車の内、太陽歯車の拡大画像がこちらです。

モーターからの動力を伝達するギヤとの固定は、シャフト部分と別に、M3ネジで2点固定します。
そのため、固定用ネジの頭が太陽歯車の中に隠れるほうが都合が良いです。そのため、太陽歯車側にはM3 ネジの頭がきちんと収まる穴をあけました。
それはそれとして、なんですが歯車で言えばアンダーカットのようなものが発生していますね。
原因は材料の反りと、あとは木材自体がレーザーにはあまり向いていないことが挙げられますね。
わかりやすいと思うのはこちらですね。
「加工技術データベース」
要は、一点に光を集めてエネルギーを集中させて材料を溶かして任意の場所を除去するということですね。
化合物である木材のようなものは融点が一定でないため、条件が一定にしづらいです。
実際に加工している最中は溶かしているのではなく、燃やしているイメージです。
ということで、そもそも木材自体が向いていないので精度が欲しい歯車は3Dプリンタで出力しようと思います。
ここで考えなくてはいけないのは、内部構造ですね。
Gcordに変換したものが以下の写真になります。
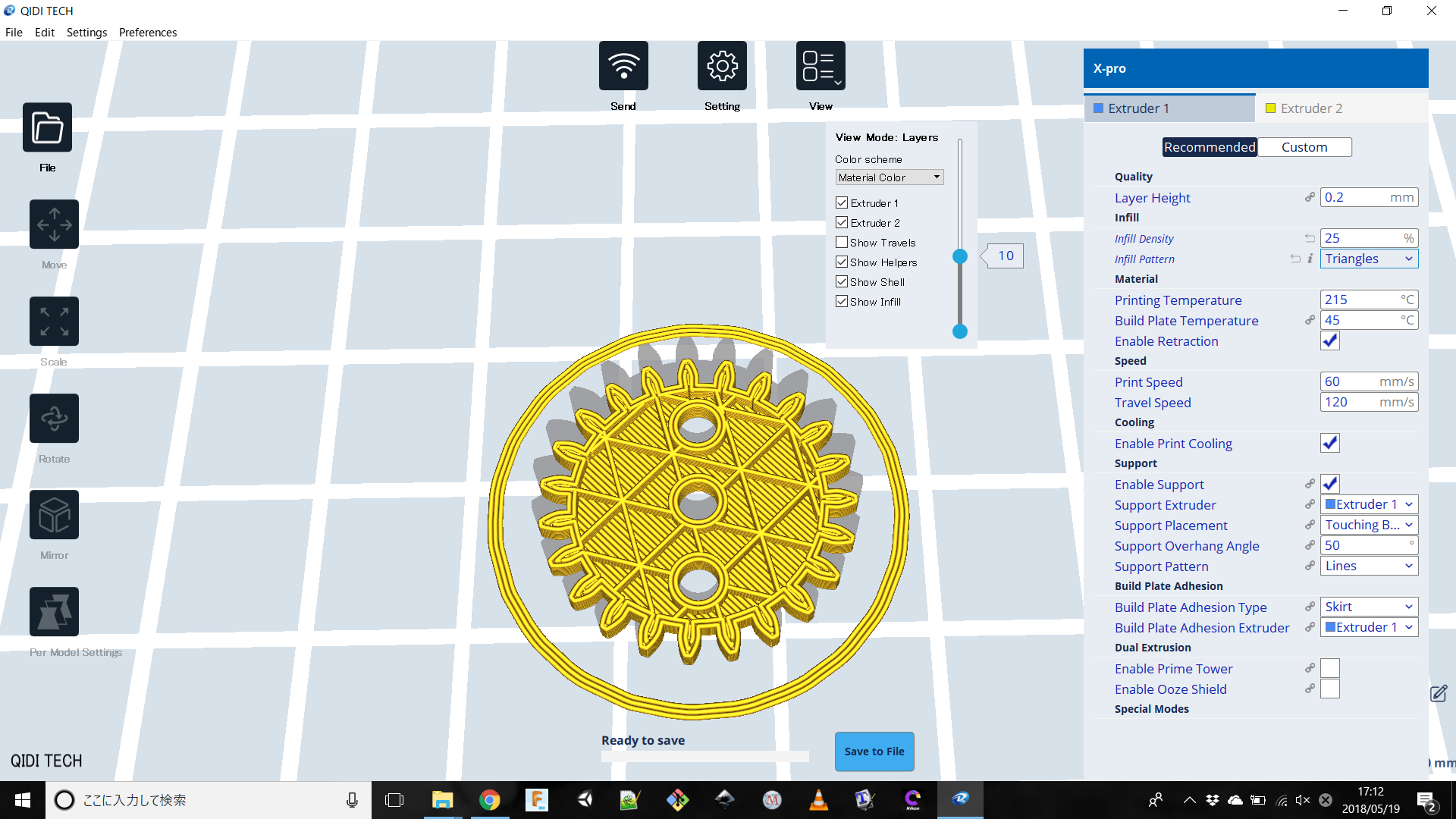
内部構造的は何種類かありますか、なんとなく強そうなものを選びました。
何種類か候補があるのでこちらもゆっくりと検証してみたいところではあります。
方法は今のところモデリング、有限要素法ですかね。
実験は…あまりできそうにないですね。お金が…トルク管理しようと思うと結構大々的になってしまいますよね…。
時間がある時に、歯元曲げ応力で検証してみようと思います。
よろしかったら、ブログランキングの向上にご協力おねがいします。
手作り・DIYランキング