�V�K�L���̓��e���s�����ƂŁA��\���ɂ��邱�Ƃ��\�ł��B
�L��
�V�K�L���̓��e���s�����ƂŁA��\���ɂ��邱�Ƃ��\�ł��B
posted by fanblog
2018�N12��10��
Visual Studio 2017 Community VC++ �Ƀ\�[�X�t�@�C����lj�������@
Visual Studio 2017 Community ��VC++���g���āAWindows32 API �v���O���~���O�̕����n�߂��Ƃ���ł��B�Q�l���́A�u�v���O���~���O�w�K�V���[�Y�@Visual C++�@�@�͂��߂Ă�Windows�v���O���~���O�v�i��Łj�ł��B�Ö{�Ŕ����܂����B���̖{�́AVC++ Ver.6.0���x�[�X�ɋL�q����Ă���̂ŁA���݂� Visual Studio 2017 Community �Ƃ͑��쐫�������Ԃ�Ⴂ�܂����A�v���O���~���O�̖{���͉����ω����Ȃ��\�[�X�v���O�����͖��C���œ��삷��悤�ł��B�i�܂��Q�͂܂ł����m�F���Ă���܂���B�jVS2017��G��̂��̏��߂āAC++�����߂āA�������{��VC++Ver.6.0�i��20�N�O�ł��傤���j�Ȃ̂ŁA�ŏ��ɁA�\�[�X�v���O������lj�����Ƃ���܂ł́A���Y�^�Ƃ��Ă������L�^���Ă������Ƃɂ��܂����B
��̃v���W�F�N�g�Ƀ\�[�X�v���O�����iXXXX.cpp�j��lj�����菇��������Ă����܂��B�i��̃v���W�F�N�g�ɂ��ẮAhttps://fanblogs.jp/papas56/archive/53/0���Q�l�ɂ��Ă��������B�j
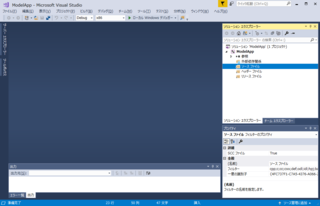
�P�DVisual Studio 2017 Community�𗧂��グ��B
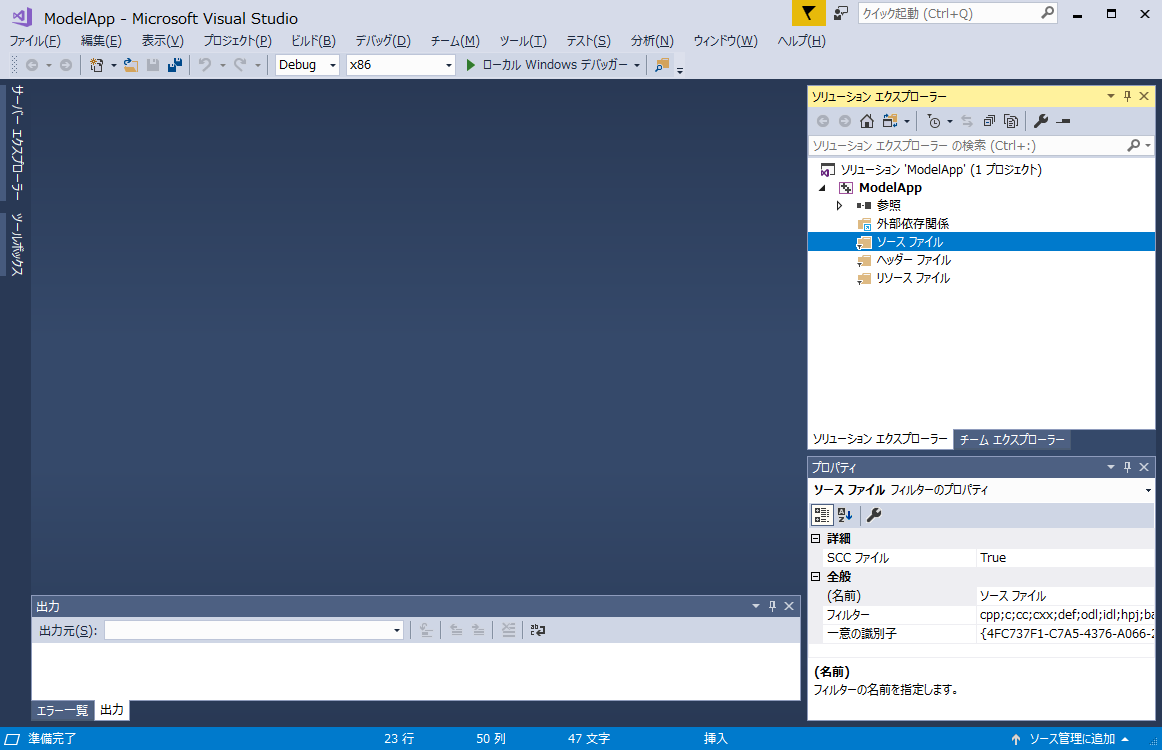
�Q�D�v���W�F�N�g���J���B�i�����ł́AModelApp�Ƃ����v���W�F�N�g�𗧂��グ�Ă��܂��B�j
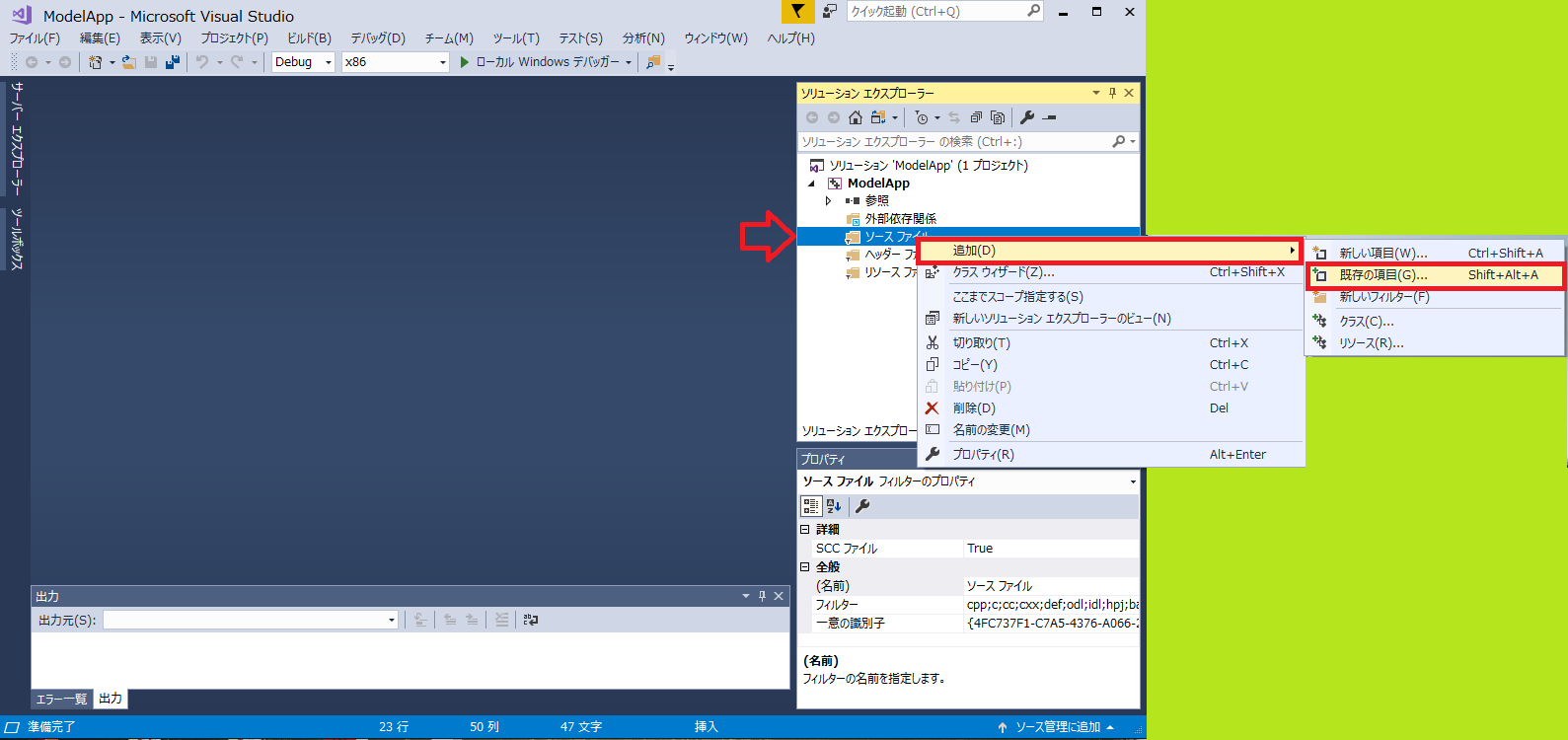
��ʂ̉E���̃\�����[�V�����G�N�X�v���[���[���g���܂��B�u�\�[�X�t�@�C���v���E�N���b�N�A�u�lj��v���N���b�N�A�u�����̍��ځv���N���b�N���܂��B
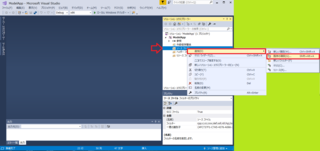
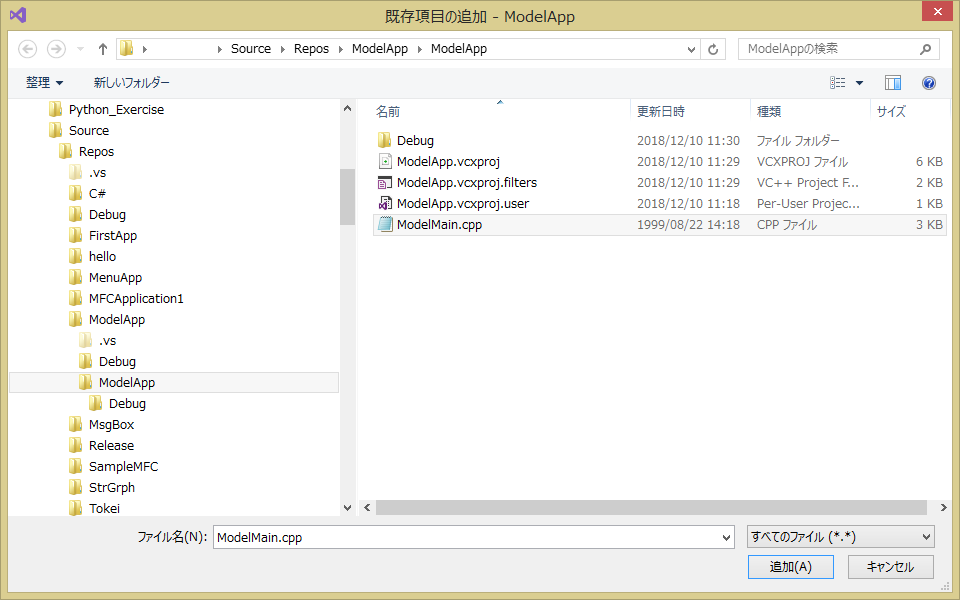
��������ƁA�u�����̍��ڂ̒lj��v�_�C�A���O�{�b�N�X���J���܂��̂ŁA�lj��������t�@�C����I�����܂��B

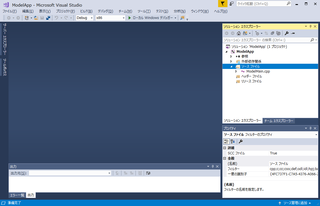
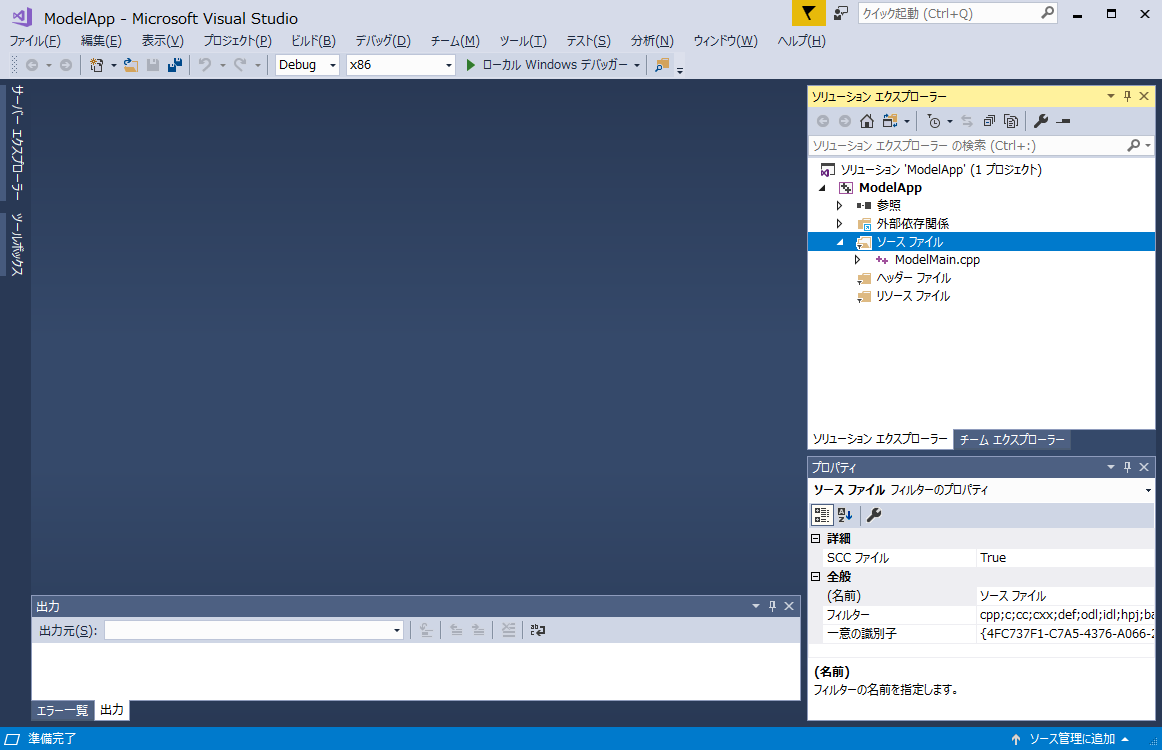
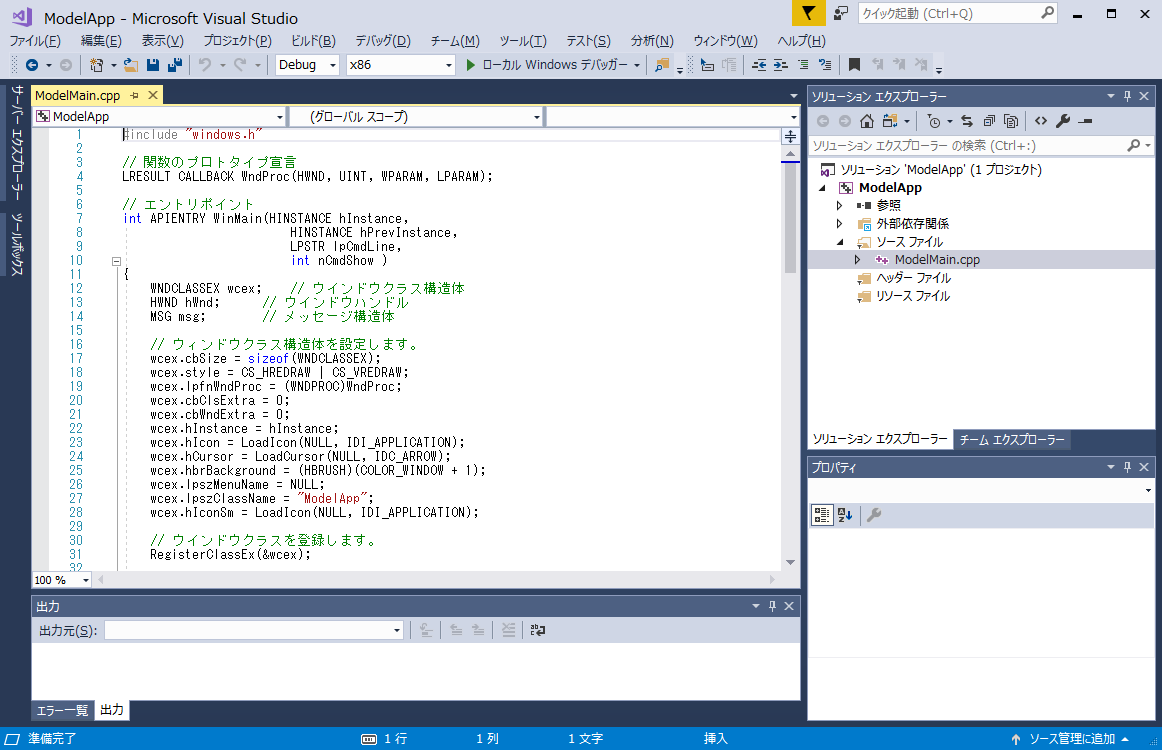
�R�DModelMain.cpp�Ƃ����t�@�C�����v���W�F�N�g�ɒlj������Ƃ���ł��B
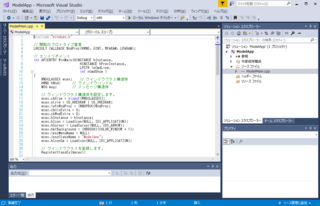
�G�f�B�^�[�G���A�Ƀ\�[�X�R�[�h��\���������Ƃ��́A�E���̃\�����[�V������G�N�X�v���[���[���̒lj������\�[�X�t�@�C�����_�u���N���b�N���܂��B���L�̂悤�ɕ\������܂��B
��̃v���W�F�N�g�Ƀ\�[�X�v���O�����iXXXX.cpp�j��lj�����菇��������Ă����܂��B�i��̃v���W�F�N�g�ɂ��ẮAhttps://fanblogs.jp/papas56/archive/53/0���Q�l�ɂ��Ă��������B�j
�P�DVisual Studio 2017 Community�𗧂��グ��B
�Q�D�v���W�F�N�g���J���B�i�����ł́AModelApp�Ƃ����v���W�F�N�g�𗧂��グ�Ă��܂��B�j
��ʂ̉E���̃\�����[�V�����G�N�X�v���[���[���g���܂��B�u�\�[�X�t�@�C���v���E�N���b�N�A�u�lj��v���N���b�N�A�u�����̍��ځv���N���b�N���܂��B
��������ƁA�u�����̍��ڂ̒lj��v�_�C�A���O�{�b�N�X���J���܂��̂ŁA�lj��������t�@�C����I�����܂��B
�R�DModelMain.cpp�Ƃ����t�@�C�����v���W�F�N�g�ɒlj������Ƃ���ł��B
�G�f�B�^�[�G���A�Ƀ\�[�X�R�[�h��\���������Ƃ��́A�E���̃\�����[�V������G�N�X�v���[���[���̒lj������\�[�X�t�@�C�����_�u���N���b�N���܂��B���L�̂悤�ɕ\������܂��B
�^�O�FVisual Studio 2017 Community Windows32 API �v���O���~���O �v���O���~���O�w�K�V���[�Y�@Visual C++�@
�y���̃J�e�S���[�̍ŐV�L���z
2018�N07��09��
[ Python IDE ] Spyder �ɂāA�R�}���h���C��������n���ăf�o�b�O������@
���Ёu�ދ��Ȃ��Ƃ�Python�ɂ�点�悤�v��ǂ݂Ȃ���APython�̕������Ă���Ƃ���ł��B���� Python�̃f�B�X�g���r���[�V�����̂P�� Anaconda ���C���X�g�[�����܂����B����ƁA�f�o�b�O���Ƃ��� IDLE �� Spyder �̗������C���X�g�[������邱�ƂɂȂ�܂��B
���Ёu�ދ��Ȃ��Ƃ�Python�ɂ�点�悤�v�͕�����₷���ĂȂ��Ȃ��悢�Ǝv���܂��B�{����ǂݐi�߂čs���ƁA�R�}���h���C��������n�����ɂԂ�������܂��B�{���iP143�@�R�����uIDLE�̊O��Python�X�N���v�g�����s����v�A�܂���8.7 �v���W�F�N�g�F�}���`�N���b�v�{�[�h�Ȃǁj�ɂ� �f�o�b�O����IDLE�Ȃ̂ŁA�R�}���h���C�������isys.argv�ɒl�����������Ƃ������Ɓj�ɒl��n���܂���̂ŁAIDLE �̊O������A�܂�R�}���h�v�����v�g������s����Ə����Ă���ł͂���܂��B���S�҂�����f�o�b�K�[�g�������̂ɁD�D�D
���̋L���ł́A�������� Spyder ���C���X�g�[������Ă���̂ŁASpyder �ŃR�}���h���C��������n���ăf�o�b�O������@�������ɏ����Ă����܂��B
Spyder���N�����܂��B�\�[�X�R�[�h�������܂��B���̏ꍇ�͓����Ж{�� 8.7�̃\�[�X�R�[�h�ɂȂ�܂��B

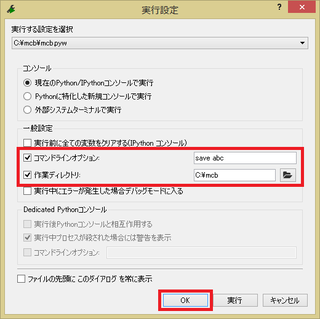
��L�̉摜�͏������Č����ɂ����̂ŃN���b�N���Ċg��ɂ��Ă��������B�R�}���h���C��������n���ɂ́A�u�ݒ�̎��s�iCtrl�{F6�j�v���N���b�N���܂��B�������V���[�g�J�b�g�L�[�ł�OK�ł��B����Ɖ��L�̎q��ʂ��o�܂��B�R�}���h���C���I�v�V�����Ƀ`�F�b�N�����āA�n�����������������܂��B���̏ꍇ�́Asave �� abc �����܂����BOK���N���b�N���Ďq��ʂ���܂��B���Ƃ͕��ʂɃf�o�b�O���邾���ł��B
�ȏ�ł��B
���Ёu�ދ��Ȃ��Ƃ�Python�ɂ�点�悤�v�͕�����₷���ĂȂ��Ȃ��悢�Ǝv���܂��B�{����ǂݐi�߂čs���ƁA�R�}���h���C��������n�����ɂԂ�������܂��B�{���iP143�@�R�����uIDLE�̊O��Python�X�N���v�g�����s����v�A�܂���8.7 �v���W�F�N�g�F�}���`�N���b�v�{�[�h�Ȃǁj�ɂ� �f�o�b�O����IDLE�Ȃ̂ŁA�R�}���h���C�������isys.argv�ɒl�����������Ƃ������Ɓj�ɒl��n���܂���̂ŁAIDLE �̊O������A�܂�R�}���h�v�����v�g������s����Ə����Ă���ł͂���܂��B���S�҂�����f�o�b�K�[�g�������̂ɁD�D�D
���̋L���ł́A�������� Spyder ���C���X�g�[������Ă���̂ŁASpyder �ŃR�}���h���C��������n���ăf�o�b�O������@�������ɏ����Ă����܂��B
Spyder���N�����܂��B�\�[�X�R�[�h�������܂��B���̏ꍇ�͓����Ж{�� 8.7�̃\�[�X�R�[�h�ɂȂ�܂��B

��L�̉摜�͏������Č����ɂ����̂ŃN���b�N���Ċg��ɂ��Ă��������B�R�}���h���C��������n���ɂ́A�u�ݒ�̎��s�iCtrl�{F6�j�v���N���b�N���܂��B�������V���[�g�J�b�g�L�[�ł�OK�ł��B����Ɖ��L�̎q��ʂ��o�܂��B�R�}���h���C���I�v�V�����Ƀ`�F�b�N�����āA�n�����������������܂��B���̏ꍇ�́Asave �� abc �����܂����BOK���N���b�N���Ďq��ʂ���܂��B���Ƃ͕��ʂɃf�o�b�O���邾���ł��B

�ȏ�ł��B
2017�N12��18��
modeequiv() �ɂ��Ē��ׂ����Ɓi���Y�^�j
�\�[�X�R�[�h�͉��L�̒ʂ�B
void
modeequiv()
{
static const struct eqdic_s {
byte tkn;
byte tdif;
int rnum;
word wu;
} eqdic[] = {
{20, 2, 52, 4000},
{10, 4, 104, 4000},
{ 4, 10, 260, 10000},
{ 2, 20, 520, 20000},
};
const struct eqdic_s *eq;
int realnum, i;
byte at, crcnt, tokadif, toka, tokanum;
byte ch, chnum, vh, adch, adchT;
word ui1, waituntil, sinterval;
rminit(false);
eq = &eqdic[oscspeed & 3];
tokanum = eq->tkn;
waituntil = eq->wu;
realnum = eq->rnum;
tokadif = eq->tdif;
sinterval = 40; // 20us
uartjob();
// ADMUX reg values
switch(oscinput) {
default:
case 0x00: adch = 0x61; chnum = 1; break;
case 0x01: adch = 0x62; chnum = 1; break;
case 0x02: adch = 0x61; chnum = 2;
tokanum >>= 1;
tokadif <<= 1;
break;
}
adchT = 0x61 + (osctrig & 7);
header(2, 0);
// This data packet contines to MARC-A
sinterval--;
crcnt = 0;
at = 0;
for(toka = 0; toka < tokanum; toka++) {
for(ch = 0; ch < chnum; ch++) {
// reset and initialize timer1
TCCR1B = 0x00; // stop, set normal mode
TCCR1A = 0x00;
TIMSK1 = 0x00; // no irq
ICR1 = 0x0000;
TCNT1 = 0x0000;
TIFR1 = 0x27; // clear flags;
// analog comparator setting
// The D6 pin is the positive input.
// The negative input is A1, A2, A3, or A4 pin.
ACSR = 0x94; // analog comparator off
DIDR1 = 0x03; // disable the digital input func of D6 and D7.
ADMUX = adchT; // select the negative input
ADCSRA = 0x04;
ADCSRB = 0x40;
// start time1 with pre=1/8 (2MHz)
// input capture noise canceler ON
TCCR1B = (osctrig & 0x10) ? 0xc2 : 0x82; // edge selection
ACSR = 0x14; // capture-on, aco to caputure timer1
TIFR1 = 0x27; // clear flags again
ui1 = (tokadif * toka) + (osctdly << 1);
// falling edge detection(rising edge for ICES1)
// doesn't stabilize without a 20usec wait below.
while(TCNT1 < 40)
;
TIFR1 = 0x27;
// wait until a trigger event happens
while(true) {
if (TIFR1 & 0x20) {
// trigger event has happened.
ui1 += ICR1;
at = 0; // a trigger event has happened.
break;
}
if (TCNT1 > waituntil) {
ui1 += TCNT1;
at = 1; // trigger failed.
break;
}
uartjob();
}
// at:0 -> trigger event has happened, 1 -> not happened
ACSR = 0x94; // disable analog comparator
ADCSRB = 0x00;
ADCSRA = 0x84; // adc enable
TCCR1B = 0x1a; // timer1 CTC-ICR1 mode pre1/8
TCCR1A = 0x00; // CTC mode;
ICR1 = ui1;
TIFR1 = 0x27; // clear flags
ADMUX = 0x60; // adc target is A0 pin to get trigger value;
ADCSRB = 0x07; // timer1 capture event;
ADCSRA = 0xf4; // adc auto trigger, force 1st conversion
// wait until the 1st conversion finishes.
while((ADCSRA & 0x10) == 0x00)
uartjob();
vh = ADCH; // trigger level
osctvolt = vh;
ADMUX = adch + ch;
ADCSRA = 0xb4; // clear flag, 1MHz, adate on
if (toka == 0 && ch == 0) { // needed only for the 1st loop
// MARC-A continued
txput1(at);
txput1(vh);
txputcrc(false);
txgo(); // start to trasmit a packet
if (at)
goto ex; // send header only when trigger failed
}
for(i = 0; i < realnum; i++) {
while(true) {
if (TIFR1 & 0x20) {
ICR1 = sinterval;
TIFR1 = 0x27; // clear timer1 flags;
}
if ((ADCSRA & 0x10) != 0x00)
break;
uartjob();
}
vh = ADCH;
ADCSRA = 0xb4; // clear flag, 1MHz, adate on
txput1(vh);
if (++crcnt >= 200) {
crcnt = 0;
// cause crc error on purpose if trigger failed(at > 0).
txputcrc((at > 0) ? true : false);
}
}
}
}
//if (crcnt > 0)
// sysdown(800);
if (crcnt == 40) {
txputcrc((at > 0) ? true : false);
}
else
sysdown(800);
ex:
txfinish(true, true);
}
�^�O�Fkit_scope Arduino_UNO
2017�N12��17��
txput�ɂ́Atxput0(byte ch), txput1(byte ch), txputcrc(boolean force_error) ������
�\�[�X�R�[�h�͉��L�̒ʂ�B
void
txput0(byte ch)
{
// to reduce the cpu consumption,
// venture to omit txn overflow check.
// if programmed properly, such an overflow never occurs.
// rxn(appears later) check is omitted as well.
txbuf[txn++] = ch;
txcrc = 0;
}
void
txput1(byte ch)
{
txbuf[txn++] = ch;
txcrc = crctbl[txcrc ^ ch];
}
void
txputcrc(boolean force_error)
{
txput0((force_error) ? ++txcrc : txcrc);
}
�^�O�Fkit_scope Arduino_UNO
uartjob() �ɂ��Ē��ׂ����Ɓi���Y�^�j
�\�[�X�R�[�h�͉��L�ɂȂ�܂��B
rollmode����rmbuf[]��ADCH�iADC�̏��8bit�j���������ށB
��������Ȃ��ƁAUDR0��txbuf[]���������ށB
rollmode����rmbuf[]��ADCH�iADC�̏��8bit�j���������ށB
��������Ȃ��ƁAUDR0��txbuf[]���������ށB
void
uartjob()
{
byte sts;//sts �́Astatus �̂��Ƃ炵��
sts = UCSR0A;//UCSRnA - USARTn����/���ڼ�A (USART Control and Status Register n A)
if ((char)sts < 0) //UCSR0A�̑�7bit��1�A�܂��M�ޯ̧�ɖ����ް�����Ƃ�������
rxbuf[rxn++] = UDR0;//UDRn - USARTn�ް� ڼ� (USART I/O Data Register n)
//��M�ޯ̧���ް�������̂�rxbuf[]�Ɏ�荞��
// in case rxbuf[] overflow, no fatal situation happens.
// because rxn is an 8 bit variable and rxbuf[] size is 256.
if (rmon) {//rmon���ĉ��H�@rm����roll memory�̂��Ƃ炵��
//rmon�́Aon��true�̎���1�Ƃ��Ă���݂����Afalse�Ȃ�0
//�����͖w�ǒʂ�Ȃ��Ƃ���H
if (TIFR1 & 0x20)//TIFR1 - ���/����1���荞�ݗv���� ڼ� (Timer/Counter 1 Interrupt Flag Register)
//����1��TOP�l�ɂȂ���
TIFR1 = 0x27; // clear timer1 flags;�@���/����1���荞�ݗv���ނ�S���ر���Ă���
if (ADCSRA & 0x10) {//ADCSRA - A/D����/���ڼ�A (ADC Control and Status Register A)
if (rmon == 1) {
ICR1 = 100 - 1; // 50us
//ICR1��16bitڼ� �����ɐݒ肷��l
//0.5us��100�{�����50us
ADMUX = 0x62;//ADMUX - A/D���d��I��ڼ� (ADC Multiplexer Select Register)
//0x62 ��d����AVCC�ű�۸ޓ��͂�ADC2 PC2�@���L�̺��ĂƖ���
rmon = 2;
rmbuf[rmw++] = ADCH; // CH1(A1pin) value
//ADC�̒l�́A8bit���x�Ȃ�ADCH��ǂނ����Ŏ������iADCL�͓ǂ܂Ȃ��j
}
else if (rmon == 2) {
ICR1 = 400 - 1; // 200us
//0.5us��400�{�����200us
ADMUX = 0x60;//0x60 ��d����AVCC�ű�۸ޓ��͂�ADC0 PC0�@���L�̺��ĂƖ���
rmbuf[rmw++] = ADCH; // CH2(A2pin) value
rmon = 3;
}
else {
ICR1 = 500 - 1; // 250us
//0.5us��500�{�����250us
ADMUX = 0x61;//0x61 ��d����AVCC�ű�۸ޓ��͂�ADC1 PC1�@���L�̺��ĂƖ���
rmon = 1;
osctvolt = ADCH; // trigger level
}
ADCSRA = 0xb4; // clear flags, 1MHz, adate on
//ADCSRA - A/D����/���ڼ�A (ADC Control and Status Register A)
//���Ѹۯ�16����
return; //in order to release cpu quickly
}
}
if (txr < txn && (sts & 0x20)) {
UCSR0A = (sts & 0xe3) | 0x40;
UDR0 = txbuf[txr++];//UDRn - USARTn�ް� ڼ� (USART I/O Data Register n)
//UDR0�͑���M�ޯ̧�A�ޯ̧�ɑ��M�ް�����������
}
}
�^�O�Fkit_scope Arduino_UNO
sysdown(int dly) �ɂ��Ē��ׂ����Ɓi���Y�^�j
�\�[�X�R�[�h�͉��L�̒ʂ�B
���W�X�^�[�ɒl�������AD13��LED��_�ł�������e�B
���W�X�^�[�ɒl�������AD13��LED��_�ł�������e�B
void
sysdown(int dly) // dly .. in msec
{
int i;
byte s;
SPCR = 0x00; // disable SPI
TCCR0B = 0x00; // stop timer0
TCCR0A = 0x02; // ctc mode
TIMSK0 = 0x00; // Disable all timer0 irqs
TIFR0 = 0x07; // clear flags
TCNT0 = 0x00;
OCR0A = 250 - 1;
TCCR0B = 0x03; // start timer0 pre = 1/64 i.e 250kHz
s = 0;
while(true) {
if (++s & 1)
PORTB |= 0x20; // D13 == HIGH (LED on)
else
PORTB &= 0xdf; // D13 == LOW (LED off)
for(i = 0; i < dly; i++) {
while((TIFR0 & 2) == 0)
;
TIFR0 = 0x07; // clear flags
}
}
}
�^�O�Fkit_scope Arduino_UNO
2017�N12��15��
txinit()�ɂ��Ē��ׂ����Ɓi���Y�^�j
�\�[�X�R�[�h�͉��L�̒ʂ�B
void
txinit(void)
{
if (txn >= TXBSZ) // TXBSZ��1100�̂��ƁA�\�[�X�R�[�h�̖`���ɒ�`���Ă���܂����I
sysdown(200); // tx buffer overflow has been detected.
txn = 0;
txr = TXBSZ;
}
�^�O�FArduino UNO kit_scope
header(byte typ, byte reqid)�ɂ��Ē��ׂ��i���Y�^�j
�\�[�X�R�[�h�͉��L�̒ʂ�B�w�b�_�[�̃f�[�^���쐬���Ă���炵���B
�ڍׂ͌����_�ł͕s���B
�@Arduino_UNO�ɑ��邽�߂̃I�V���X�R�[�v�̐ݒ������Ă���炵���B
�Atxbuf[]�ɏ������މƓǂ݂�������v���Ă��Ȃ����R���s���B
�ڍׂ͌����_�ł͕s���B
�@Arduino_UNO�ɑ��邽�߂̃I�V���X�R�[�v�̐ݒ������Ă���炵���B
�Atxbuf[]�ɏ������މƓǂ݂�������v���Ă��Ȃ����R���s���B
void
header(byte typ, byte reqid)
{
static byte seq;//static������O�̒l��ێ����Ă���
txinit();
uartjob();
// prologue
//���́H
txput0(0xaa);//txbuf[]�ɏ�������
txput0(0x55);//txbuf[]�ɏ�������
txput0(0xa5);//txbuf[]�ɏ�������
txput0(0x5a);//txbuf[]�ɏ�������
uartjob();//�����܂�txbuf[]��4�������Atxbuf[]����ǂ݂������̂͂���1��A
txput1(typ);
if (typ == 3)//3����rollmode�Ȃ́H
txput1(seq++); // rollmode
else
txput1(reqid);
txput1(oscspeed);
txput1(oscinput);
uartjob();//txbuf[]�ɏ������މƓǂ݂�������v���Ȃ��̂́H
txput1(osctrig);
txput1(osccupgain);
txput1(osctdly >> 8);
txput1(osctdly);
uartjob();
txput1(oscofreq >> 16);
txput1(oscofreq >> 8);
txput1(oscofreq);
txput1(oscoduty);
uartjob();
}
�^�O�Fkit_scope Arduino_UNO
moderoll()�ɂ��Ē��ׂ����Ɓi���Y�^�j
moderoll()�́Akit_scope.ino ���� loop() �̒��ɂ�����ł��B
�ڍׂ͂܂��s���B
�@rmon==0�̎��i�v���O�����J�n����̎����H�j
�@�e�탌�W�X�^�[�ɒl����
�Aheader(3, 0)�����s
�@txput1(0)
�@txput1(osctvolt)
�@txputcrc(false)
�@��L�͉�������f�[�^�𑗐M���Ă���
�Btxgo()�����s�@�p�P�b�g�𑗐M�J�n
�Cfor�������s�@���̒��ł����炭���߂Ƀw�b�_�[�f�[�^���A���ɔg�`�f�[�^�𑗐M���Ă���炵��
�Dtxputcrc(false)
�@txfinish(true, true)�@�����s���A��A�̃f�[�^���M�������Ƃ������Ƃ炵��
�\�[�X�R�[�h�͉��L�̒ʂ�B
�ڍׂ͂܂��s���B
�@rmon==0�̎��i�v���O�����J�n����̎����H�j
�@�e�탌�W�X�^�[�ɒl����
�Aheader(3, 0)�����s
�@txput1(0)
�@txput1(osctvolt)
�@txputcrc(false)
�@��L�͉�������f�[�^�𑗐M���Ă���
�Btxgo()�����s�@�p�P�b�g�𑗐M�J�n
�Cfor�������s�@���̒��ł����炭���߂Ƀw�b�_�[�f�[�^���A���ɔg�`�f�[�^�𑗐M���Ă���炵��
�Dtxputcrc(false)
�@txfinish(true, true)�@�����s���A��A�̃f�[�^���M�������Ƃ������Ƃ炵��
�\�[�X�R�[�h�͉��L�̒ʂ�B
void
moderoll()
{
byte i;
if (rmon == 0) { // start rollmode
// reset and initialize timer1
TCCR1B = 0x00; // stop
TCCR1A = 0x00;
TIMSK1 = 0x00; // no irq
TCNT1 = 0x0000;
ICR1 = 200; // 100 usec
TIFR1 = 0x27; // clear flags;
ACSR = 0x94; // disable analog comparator
ADCSRB = 0x00;
ADCSRA = 0x84; // adc enable
ADMUX = 0x60; // adc target is A0 pin to get trigger value;
ADCSRB = 0x07; // timer1 capture event;
ADCSRA = 0xf4; // adc auto trigger, force start 1st conversion
TCCR1B = 0x1a; // timer1 CTC-ICR1 mode pre1/8
TCCR1A = 0x00; // CTC mode;
// wait until the 1st conversion finishes.
while((ADCSRA & 0x10) == 0x00)
uartjob();
osctvolt = ADCH; // trigger level
ADMUX = 0x61;
ADCSRA = 0xb4; // clear flag, 1MHz, adate on
rminit(true);
}
header(3, 0);
txput1(0);
txput1(osctvolt);
txputcrc(false);
txgo(); // start to trasmit a packet
for(i = 0; i < 200; i++) {
while(rmw == rmr)
uartjob();
txput1(rmbuf[rmr++]);
}
txputcrc(false);
txfinish(true, true);
}
�^�O�Fkit_scope Arduino UNO
kit_scope.ino �ɂ��Ē��ׂ����Ɓi���Y�^�j
kit_scope.ino�́AArduino�J�����̃\�[�X�R�[�h�ł��Bv0.72�@Mar 20, 2016�ł��g�p���Ă��܂��B
ATmega328P�̃f�[�^�V�[�g�͎x�Ⴊ�Ȃ�����A���L�i���{��j���Q�Ƃ��܂��B
https://avr.jp/user/DS/PDF/mega328P.pdf
Arduino�J�����ɂ��Ă͎x�Ⴊ�Ȃ�����A���L�i���{��j���Q�Ƃ��܂��B
http://www.musashinodenpa.com/arduino/ref/
���̕����ōs���Ă���̂́A���͐M����AD�ϊ���UART��PC�ւ̑��M�AUART��PC����̃R�}���h�̎�M�ƂȂ�܂��B
Arduino �̃\�[�X�R�[�h�̌`����C����ɏ]���܂����Asetup()�ɏ����ݒ�������Aloop()�ɒʏ폈���������܂��Bsetup()�͕����ʂ�P�����s����܂��Bloop()�������ʂ�ŁA����͖������[�v�ɂȂ�܂��Bsetup()��loop()��u�����Ԃ́A���ɖ����悤�ł��B�啶���ŋL�ڂ���Ă���ϐ��́ACPU(AtMega)�̃��W�X�^�[�ƂȂ�܂��B���W�X�^�[��AtMega�̎d�l���ɋL�ڂ���Ă��閼�̂��̂܂܂ŁA�ϐ��錾���Ȃ��Ŏg�p���܂��Bcli()�̊���Ardino���ŗL�̂��̂ŁA�S�Ă̊��荞�݂��֎~�ɂ�����ł��B
ATmega328P�̃f�[�^�V�[�g�͎x�Ⴊ�Ȃ�����A���L�i���{��j���Q�Ƃ��܂��B
https://avr.jp/user/DS/PDF/mega328P.pdf
Arduino�J�����ɂ��Ă͎x�Ⴊ�Ȃ�����A���L�i���{��j���Q�Ƃ��܂��B
http://www.musashinodenpa.com/arduino/ref/
���̕����ōs���Ă���̂́A���͐M����AD�ϊ���UART��PC�ւ̑��M�AUART��PC����̃R�}���h�̎�M�ƂȂ�܂��B
Arduino �̃\�[�X�R�[�h�̌`����C����ɏ]���܂����Asetup()�ɏ����ݒ�������Aloop()�ɒʏ폈���������܂��Bsetup()�͕����ʂ�P�����s����܂��Bloop()�������ʂ�ŁA����͖������[�v�ɂȂ�܂��Bsetup()��loop()��u�����Ԃ́A���ɖ����悤�ł��B�啶���ŋL�ڂ���Ă���ϐ��́ACPU(AtMega)�̃��W�X�^�[�ƂȂ�܂��B���W�X�^�[��AtMega�̎d�l���ɋL�ڂ���Ă��閼�̂��̂܂܂ŁA�ϐ��錾���Ȃ��Ŏg�p���܂��Bcli()�̊���Ardino���ŗL�̂��̂ŁA�S�Ă̊��荞�݂��֎~�ɂ�����ł��B